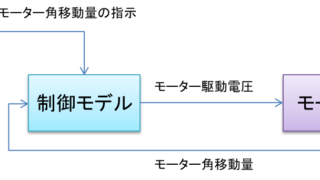
scilab ScilabによるモーターMILS scilab/xcosで以下を実施。モーターの動特性を持ったモータープラントモデルの作成モーターといってもブラシ付きDCモーターモーターの先の負荷は一旦無視。(つまり空転状態)そのモーターを制御する制御モデルの作成さらにそれらを合体させてMILSにする。 2020.03.05 scilabモーター
gdb gdbによるISS その2 gdbをISS(インタラクションセットシミュレータ)として利用した上で、制御器の検証に応用する方法。ARM-gdbを使用。Scilabで作成した制御モデル、モータープラントモデルと連携。ELF/DWARFはソースコードファイル名や各ソースライン情報を保持している。 2020.01.22 gdbscilab
scilab scilabとRTOSのCoSimulation 後編 scilabとTOPPERS/JSPの協調シミュレーション。CoSimulationとも呼ばれ、ScilabとRTOS間にCoSimulationインターフェースを設置。それを利用して通信することで異なるシミュレーション間で連携してシミュレーションができる。 2020.01.20 scilab
scilab scilabとboost:statechartの連携(中編) scilabとboost:statechartの連携 中編です。前回、青図を描きました。理屈上は大丈夫そうなのですが、実際にやってみないと分からんよねってことで、もうちょっと具体的に設計からやってしまいたいと思います。 2020.01.16 scilab
scilab scilabとboost:statechartの連携(前編) ScilabのCBlockの特殊な使用方法の一端。C++Boos:statechartを併用した手法。WindowsいうとLoadlibrary、GetProcAddressUnix系OSであればdlopen、dlsymというAPIを使用すればとりあえずできそう。 2020.01.13 scilab
scilab scilabの紹介 scilabによるPID制御及びモーターシミュレーション。PID制御器とモータープラント。Scilab CBlockにCコードをいれて動作確認。さらに、浮動小数点から固定小数点化しても制御が成立するかを確認。モデルとCコードの挙動を比較することで正しさを証明することができる。 2020.01.13 scilab
 scilab scilab
scilab scilab 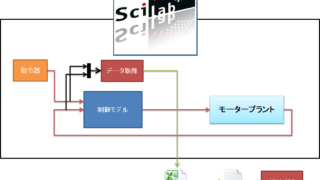 gdb
gdb 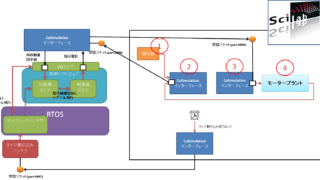 scilab
scilab  scilab
scilab 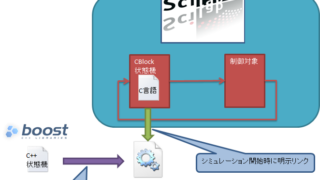 scilab
scilab  scilab
scilab