事例 【上流検証】最小構成のモデルベース開発事例 その33【ネットワークRAPID⑥】 今回は、CAPLを使用したシステム変数のシグナルへの分配を行う。CAPLはValueObjectというイベントハンドラを起点に処理を走らせる。シグナル更新とCAN送信は別物。シグナルの更新有無に関係なく送信周期を定義できる。 2020.06.28 事例
事例 【上流検証】最小構成のモデルベース開発事例 その32【ネットワークRAPID⑤】 今回は、システム変数の定義と出力の仕方の話になる。SimulinkモデルからCANoeのシステム変数に出力する場合はSystemVriableOutputブロックを使用する。CANoeでシステム変数を定義できる。システム変数の型は、扱うシグナルに近いものを選択しておいた方が良い。 2020.06.27 事例
事例 【上流検証】最小構成のモデルベース開発事例 その31【ネットワークRAPID④】 SimulinkDLLの出力を2つのシグナルに渡すには2つの手法がある。Signal Outputブロックを2つ使用。システム変数に書き込んでからCAPLで各シグナルへ分配。複数の回線のシグナルを扱うにはゲートウェイノードを定義する必要がある。SimulinkDLL、CAPLのどっちを使うにしても同様の対応が必要。 2020.06.26 事例
事例 【上流検証】最小構成のモデルベース開発事例 その30【ネットワークRAPID③】 前回はMicroAutoBoxで使用されていたSimulinkモデルを取得した。このSimulinkモデルの主要ロジックだけを抜き出して単体テストをしてみる。Simulinkモデルだけでは正しい保証は困難。テストパターンとテスト結果もセットであれば、最も正しい仕様書になる可能性は高い。 2020.06.25 事例
事例 【上流検証】最小構成のモデルベース開発事例 その29【ネットワークRAPID②】 正直言うとまずはMicroAutoBox使った方が良い。すでに精度や性能の見積が出来ているのであれば、費用対効果を意識しだしても良い。プログラマブルな振る舞いの場合、MATLAB Functionブロックを使用した方が楽な場合がある。可能であれば、StateFlowの利用も検討しておくと状態の見える化が出来て吉。 2020.06.24 事例
事例 【上流検証】最小構成のモデルベース開発事例 その28【ネットワークRAPID①】 前回まででネットワークMILSは終了したが、何となく似たようなのネタスタート。違いは、ブラックボックスを許容してしまっている点?ダミーの信号を作る際は、普通はラピッドコントローラを使用する。時間精度がそれほど求められないのであれば、PCから制御するタイプでもある程度なんとかなる。 2020.06.23 事例
scilab scilabとRTOSのCoSimulation 後編 scilabとTOPPERS/JSPの協調シミュレーション。CoSimulationとも呼ばれ、ScilabとRTOS間にCoSimulationインターフェースを設置。それを利用して通信することで異なるシミュレーション間で連携してシミュレーションができる。 2020.01.20 scilab
scilab scilabの紹介 scilabによるPID制御及びモーターシミュレーション。PID制御器とモータープラント。Scilab CBlockにCコードをいれて動作確認。さらに、浮動小数点から固定小数点化しても制御が成立するかを確認。モデルとCコードの挙動を比較することで正しさを証明することができる。 2020.01.13 scilab
 事例 事例
事例 事例  事例
事例  事例
事例  事例
事例  事例
事例  事例
事例 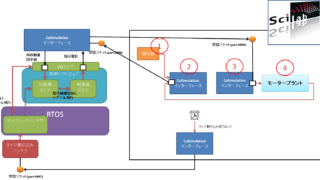 scilab
scilab  scilab
scilab