エンジン エンジン制御概要 MAF(吸気流量センサ) エンジンに吸気される空気量を測定する重要なセンサ。空気量そのものが計測出来れば良いが実はそう簡単な話では無い。一般名称はエアフロメータ。以下のタイプが存在する。(by Wikipedia)・フラップ式(メジャリングプレート式)・熱線式(ホットワイヤー式・カルマン渦流式 2020.03.24 エンジン
エンジン エンジン制御概要 クランク角センサ クランク角センサの役割はエンジン回転数の算出につきる。パルス波形の生成方法とそこからのエンジン回転数算出について記載する。4ストローク1サイクルエンジンは、1サイクルを完結させるために吸気、圧縮、燃焼、排気の4行程を要する。1サイクルはクランク2回転となる。 2020.03.23 エンジン
エンジン エンジン制御概要 O2センサ O2センサの特性や空燃比フィードバックの概要を記載する。理論空燃費(燃料1[g]に対して空気14.7[g])を中心にリッチ時に1[V]、リーン字に0[V]となる。O2センサと比べ全領域空燃比センサの方がさらに理想空燃比を維持できるため、排ガス規制の強化についていけているという背景もある。 2020.03.22 エンジン
エンジン エンジン制御概要 自身でmatlab/simulink等を使ってECU設計/検証/シミュレーションの業務を行っていると言い張っているが、実際にECUがどのような目的でどのような制御を行っているかまで把握していることは少ない。接続されているデバイスと故障診断希(スキャンツール)を起点にして知識掘り下げを行い、知見拡大を狙う。 2020.03.21 エンジン
モーター モーター伝達関数導出 モーターの伝達関数そのものはググればそれなりに出てくる。 しかし、どのように導出したかわからなければその後の調整、応用ができなくなる。モーターの等価回路から、電圧から電流の伝達式を導出。モーターの発電原理から角速度から逆起電力の伝達式を導出。モーターのトルク原理から、電流からトルク、角加速度の伝達式を導出。 2020.03.12 モーター
モーター モーター伝達関数導出(分解/再構築編) 場合によって、伝達関数ブロックを使用できない局面があり得る。伝達関数の中間の帰還パラメータが変動し得る。制御モデルの推定で使用するため離散化されている必要がある場合。自前のHILSっぽい装置で、やはり離散化されている必要がある場合。 2020.03.12 モーター
モーター モーター伝達関数導出(伝達関数編) 伝達関数「電圧→トルク→角速度→角移動量」を纏めてモデル化。電圧からトルク、トルクから角速度、角速度から角移動量。全ての変換関数を組み合わせて、Scilabでシミュレーションを実施。 2020.03.10 モーター
モーター モーター伝達関数導出(トルク発生原理編) フレミングの左手の法則より、磁界の中を長さlの導体に電流I_mを流すとローレンツ力Fが発生する。トルクは力Nとそこからの距離l[m]のクロス積(外積)。Ktはトルク定数と呼ばれるものである。モーターの発電原理で出てきた逆起電力定数K_eもBlrをまとめたものである。トルク定数Ktと逆起電力定数Keは同値になる。 2020.03.09 モーター
scilab ScilabによるモーターMILS scilab/xcosで以下を実施。モーターの動特性を持ったモータープラントモデルの作成モーターといってもブラシ付きDCモーターモーターの先の負荷は一旦無視。(つまり空転状態)そのモーターを制御する制御モデルの作成さらにそれらを合体させてMILSにする。 2020.03.05 scilabモーター
gdb gdbでSPILS その2 SPILSネタの続きです。前回、SPILSでscilabからgdbに接続する構成を示しましたが、以下の構成の方が一般的です。もう一個別のgdbをgdbサーバーとして起動。scilab直下のgdbからリモートデバッグする体で接続しています。 2020.01.26 gdbscilab
 エンジン エンジン
エンジン エンジン  エンジン
エンジン  エンジン
エンジン  エンジン
エンジン 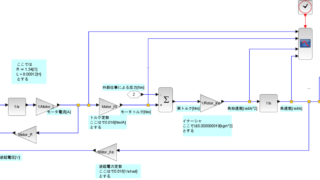 モーター
モーター 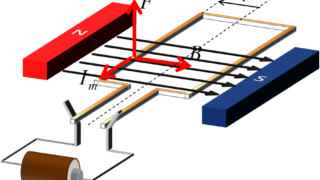 モーター
モーター 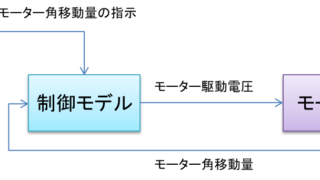 scilab
scilab 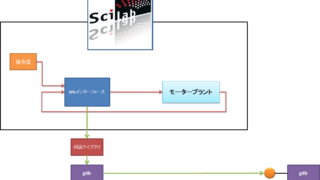 gdb
gdb