 モーター
モーター 【TI】モデルベース開発とモータ その5【TN】
モデルベース開発に於いては、リアルさを求めることは重要だが、そのリアルさの取捨選択も重要と学んだ。今回はモータのスペックシートの読み方を覚えることになる。モータのスペックシートは予想以上にあっさりしていることがあるが、それを元に様々な特性を算出できる。直接計測できない物理量が算出できるが、これを制御に利用するかは目的次第。
モーター  モーター
モーター  モーター
モーター  モーター
モーター  モーター
モーター 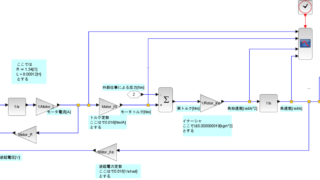 モーター
モーター  モーター
モーター  モーター
モーター