株価予測 【FFT】MATLAB、Pythonで株価予測 その30【IFFT⑨】 FFT出力の周波数分布をローテーションをMATLABで実施。複素共役が0点を中心とした線対称になるように配置。この配置の方が確認し易さ、処理のし易さが増す想定。よって、配置が意識できていればやらなくてもOK。効能は実際の処理をする際に確認。 2022.05.22 株価予測
株価予測 【FFT】MATLAB、Pythonで株価予測 その29【IFFT⑧】 MATLABでベクトルローテーションをさせたい場合はcircshift関数を使えばOK。ただし、次元指定の罠がある。デフォルト次元が列方向なので、行ベクトルに対して行うとローテーションされない。(実際には列方向にローテーションはされてると思う)[0,3]のように列行それぞれにローテーション数を指定する。 2022.05.21 株価予測
株価予測 【FFT】MATLAB、Pythonで株価予測 その28【IFFT⑦】 IFFTにも活躍してもらうため簡易的なバンドパスフィルタを実施予定。周波数分布関数の後半に複素共役が居るため、これも同等の処置が必要。複素共役の位置を分かりやすくするため、マイナス側に持ってくる予定。ベクトルに対するシフト、ローテーションで対応可能。なはず。 2022.05.20 株価予測
株価予測 【FFT】MATLAB、Pythonで株価予測 その26【IFFT⑤】 複数の周波数のsin波を合成したもの対してFFT&IFFT実施。波形の合成は単純に足し算するだけ。想定通りの周波数分布になった。試しに入力サンプリング期間を2倍に伸ばしてみた想定通り、周波数が2倍になる分布に変化。 2022.05.18 株価予測
株価予測 【FFT】MATLAB、Pythonで株価予測 その24【IFFT③】 引き続きsin波をFFTに入れる実験継続。今回は入力期間を2πから4πに増やしてみた。これにより、結果的に期間内のsin(x)の振動は増える。よって、FFTの結果としてのsin(x)の周波数は1Hzではなく2Hzとなる。あくまで、入力サンプリングを1周期とした周波数である点に注意。物理的な周波数とは異なる。 2022.05.16 株価予測
株価予測 【FFT】MATLAB、Pythonで株価予測 その23【IFFT②】 sin波でFFT、IFFTを実施。パッと見ちゃんと元に戻ってるのは確認。FFTの出力である周波数の分布は前半と後半で意味が異なる。後半が前半の複素共役に当たり、IFFT時に虚数部を相殺する役割を追っている。特定周波数を取り出すばあは複素共役部分も一緒に取り出す必要がある。 2022.05.15 株価予測
株価予測 【FFT】MATLAB、Pythonで株価予測 その22【IFFT①】 FFT、IFFTの入出力って実は良く分かってない。よって、自明且つシンプルな波形を入れて評価して見た方が良い。自明且つシンプルな波形はsin波とかそれらの合成波。実験はMATLABで実施するが、Pythonコードを起こす予定。ぶっちゃけメンドクサイとは思ってるけど頑張ってやる。 2022.05.14 株価予測
事例 【FMU】最小構成のMBD事例 第2章 その37【FMI⑧】 FMU/FMIはあまり一般的に知られているものではないので利用方法の情報が皆無。よって、仕様に踏み込まないと利用方法も見えない。仕様書を読み込むのも大変なのでFMU自体の中身を見て行った方が理解としては楽そう。実はFMUは特定のファイルとフォルダ構成をzip圧縮したもの。つまり解凍して中身を参照できる。 2021.07.12 事例
事例 【FMU】最小構成のMBD事例 第2章 その36【FMI⑦】 FMU/FMIのシミュレーション方式とSolverの位置づけを図解した。MEは近似精度を調整したい場合に有利。ECUの粗い制度を再現したい。プラントの演算負荷を下げてシミュレーションを高速化したい。CSは内部にSolverがあり、繋ぐだけで動くので設定が簡単。CSのみのサポートしかしていないツールもある。 2021.07.11 事例
事例 【FMU】最小構成のMBD事例 第2章 その35【FMI⑥】 FMU/FMIのシミュレーション方式は2種類ある。Model Exchange(通称ME)。外部にSolver。Co-Simulation(通称CS)。内部にSolver。SolverはODE Solverのこと。常微分方程式を解決する機能。オイラー法、ホルン法などが有名。 2021.07.10 事例
 株価予測 株価予測
株価予測 株価予測  株価予測
株価予測  株価予測
株価予測  株価予測
株価予測  株価予測
株価予測  株価予測
株価予測  株価予測
株価予測  事例
事例 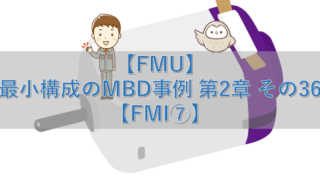 事例
事例  事例
事例