MATLAB、Python、Scilab、Julia比較ページはこちら
https://www.simulationroom999.com/blog/comparison-of-matlab-python-scilab/

はじめに

の、
MATLAB,Python,Scilab,Julia比較 その79【PID制御⑧】
を書き直したもの。
DCモータの状態空間モデルは作成したが、
そこにPID制御器を追加。
これをJuliaで実現する話。
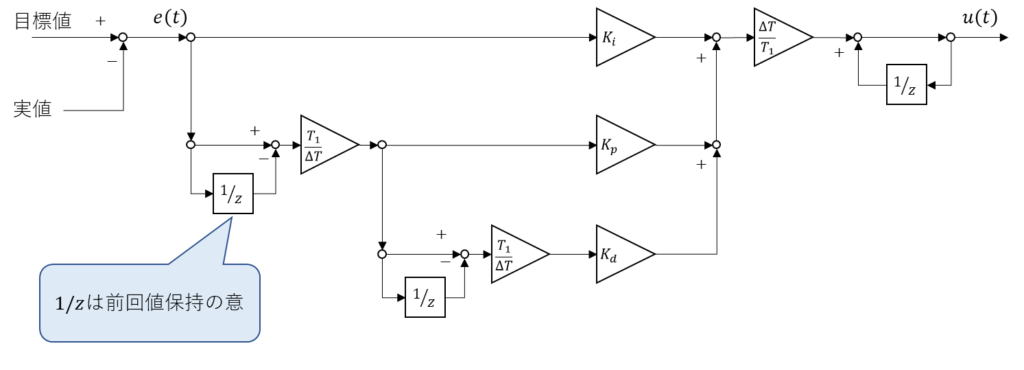
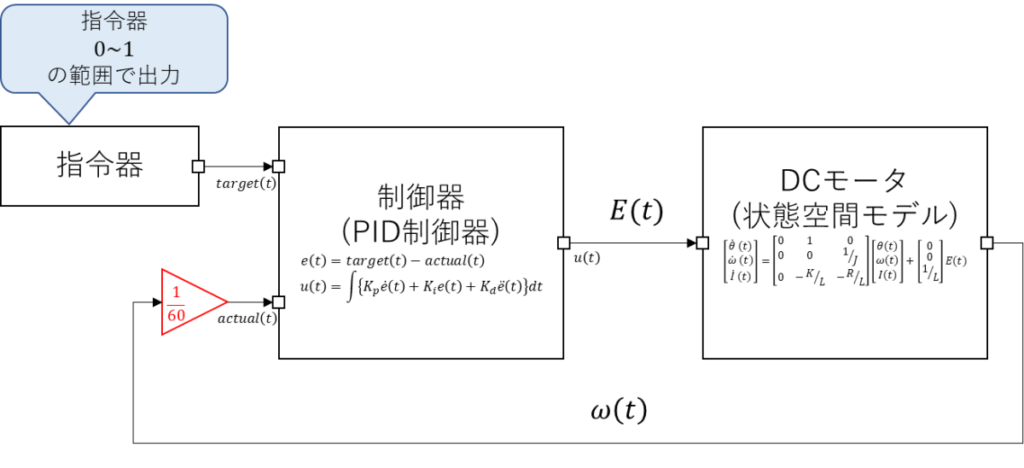
PID制御器のブロック線図と全体構成
PID制御器のブロック線図と全体構成は以下となる。
Juliaコード
Juliaコードが以下になる。
using PyPlot
function statespacemodel(A,B,C,D,u,dt,x)
# 状態方程式
x = x + (A*x + B*u) * dt;
# 出力方程式
y = C*x + D*u;
return x,y;
end
mutable struct PID_state
pzi::Float64
izi::Float64
dzi::Float64
end
function PIDController(state, target, actual, Kp, Ki, Kd, dt, t1)
e_i = target - actual;
e_p = (t1/dt)*(e_i - state.pzi);
e_d = (t1/dt)*(e_p - state.dzi);
u = (dt/t1)*(e_p*Kp + e_i*Ki + e_d*Kd) + state.izi;
state.pzi = e_i;
state.dzi = e_p;
state.izi = u;
return state, u;
end
function statespacemodel_pid()
K=0.016;
J=0.000000919;
R=1.34;
L=0.00012;
A=[0 1 0 ; 0 0 K/J ; 0 -K/L -R/L];
B=[0 ; 0; 1/L];
C=[1.0 0 0; 0 1.0 0; 0 0 1.0];
D=[0.0 ; 0.0 ; 0.0];
dt = 0.0001;
t = range(0, 1.0-dt, step=dt); # 時間(横)軸
u = zeros(1,10000); # 入力信号生成
u[1,5000:10000].=1.0; # 0.5秒後に0から1へ
y = zeros(3,length(t));
x = zeros(3,1);
state = PID_state(0.0, 0.0, 0.0);
ratio = 1/60;
Kp = 0.80;
Ki = 0.45;
Kd = 0.0;
t1 = 0.005;
omega = 0;
uPID = zeros(1,length(t));
for i = 1:length(t)
state,uPID[1,i] = PIDController( state, u[:,i][1], omega*ratio, Kp, Ki, Kd, dt, t1 );
x,y[:,i] = statespacemodel(A,B,C,D,reshape(uPID[:,i],1,1),dt,x);
omega = y[2,i];
end
subplot(3,1,1);
plot(t,uPID',color="r");plot(t,u',color="b", linestyle="--");
xlim([0,1]);ylim([-0.1,1.1]);
subplot(3,1,2);
plot(t,y[1:2,:]');
xlim([0,1]);ylim([-5,65]);
subplot(3,1,3);
plot(t,y[3,:]);
xlim([0,1]);ylim([-0.1,1]);
return;
end
statespacemodel_pid();おおよそMATLABと一緒だが、
構造体がmutableで定義している。
Juliaも構造体定義としてstructというキーワードはあるが、
structだと内部のメンバ変数の更新ができない。
対して、mutableはメンバ変数が更新可能な構造体になる。
よって、今回はmutableを使用している。
シミュレーション結果
そしてシミュレーション結果は以下となる。
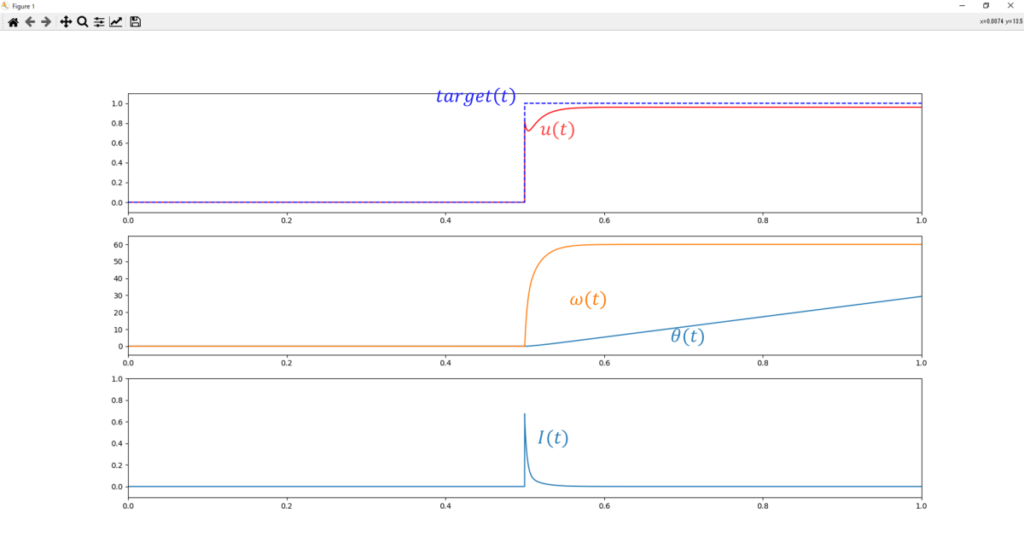
ATLAB、Python、Scilabと同じ結果となり、
JuliaでのシミュレーションもOKと言える。
まとめ
- JuliaでDCモータ状態空間モデルをPID制御シミュレーション。
- Juliaも構造体を定義できるが、structだと更新不可になる。よってmutableを使って更新可能な構造体にする必要がある。
- シミュレーション結果は他のツール言語と同じ結果が得られた。
MATLAB、Python、Scilab、Julia比較ページはこちら

コメント