バックナンバーはこちら
https://www.simulationroom999.com/blog/model-based-of-minimum-backnumber/

はじめに
前回は、論理構成を考えた。
その際に簡易HILSの案も浮かび、品質保証リスク低減を試みることになった。
今回は簡易HILS案の関係者間調整と物理値変換の話になる。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
簡易HILS案はどうなったか?
で、どうなった?
一応上司にも委託先にもOKは貰ったよ。
委託先も検証に関しては悩んでいたみたいで、
簡易HILSを利用した検証結果を元にしたエビデンスが検収要件なら、
そっちの方が分かり易いって。
上司は『よくわからんが、すごそうだからいいぞ!』って言ってた。
委託先の方々は結構しっかりしてそうで安心した。
(上司の方は相変わらずだな。)
でも、
仕様ありきだからそこらへんのレクチャーはよろしく!
はいはい。
で、
次は何について書いたら良い?
うーん、
ある程度詳細に入る段階だからどこからでも良いが、
足回りから攻めた方が良いかな。
足回り?
前回の論理構成で言うところの物理値変換周り。
あーなるほど。
APコントローラと簡易HILSの両方の共通仕様だし、
そこから検討する方が自然な気がするね。
物理値変換
で、各部品の特性仕様はあるの?
うーん、文面でもらってはいるけど。
こんな感じ。
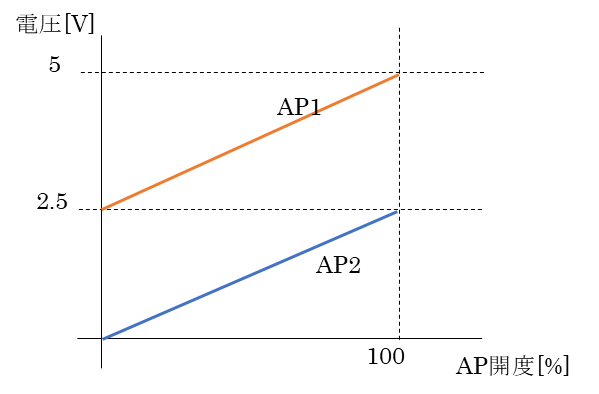
- AP1 リニア特性 \(2.5[V]~5.0[V]:0[\%]~100[\%]\)
- AP2 リニア特性 \(0.0[V]~2.5[V]:0[\%]~100[\%]\)
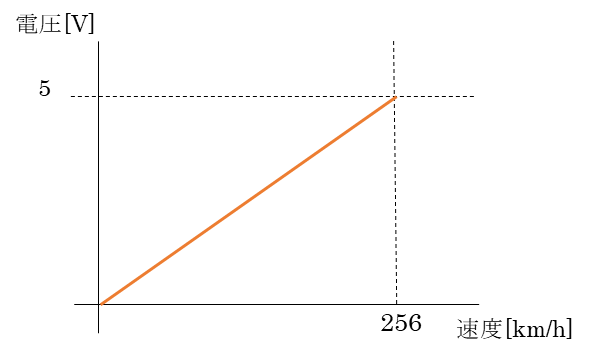
- GPS車速 リニア特性 \(0.0[V]~5.0[V]:0[km/h]~255[km/h]\)
なるほど。
結構シンプルだからほぼ悩まないかな。
AP1とAP2ってアクセル開度の2系統のことだと思うんだけど、
電圧の範囲が違うんだね。
所謂、フェールセーフ用だね。
ECUはAP1とAP2を両方監視していて、どちらか特性から外れると制御を安全方向にするんだ。
特に同時に断線した場合、AP1とAP2のECU側の入力は中間電位である、2.5[V]になるんだ。
しかし、AP1とAP2の仕様上特性を異なるものしていると、
両方が同時に2.5[V]ということはあり得ないので、
ECU側は断線したと判断でき、安全方向の処理ができるわけだ。
というわけで、
安全性に関わる部分は同様に多重化して、
異常検知し易くしていることが多い。
ほーなるほどー。
で、今回はどうしたら良いのかな?
安全要件次第だけど、
AP1とAP2の開度一致評価だけして、
不一致の場合はECU側へバイパスして、
フェールセーフそのものはECU側に任せるのが良いだろうね。
あと、
完全一致というのも無いので、許容誤差なんかも決めおくと良いよ。
物理値変換は貰った文面そのままで良いのかな?
このままで十分伝わりそうだけど、
グラフに起こしてあげた方が親切かな。
と思って描いておいたよ。
(成長したなぁ)
具体的な
フローチャートとか関数名とかも決めておいた方が良いのかな?
委託先との取り決め次第ではあるが、
今回の仕様書の範囲としては不要かな。
必要な場合は、別のドキュメントとして定義した方が良いね。
うん。そうする。
まとめ
まとめだよ。
- 外部委託する際/される際は何かしら明確な検収要件を決めるべき。
- 特に実環境が容易に手配できない場合は、大体手段を用意する必要がある。
- アクセル開度のように安全性に関わる部分は多重化していることが多い。
バックナンバーはこちら

コメント