バックナンバーはこちら
https://www.simulationroom999.com/blog/model-based-of-minimum-backnumber/

はじめに
前回でCANoeのノードに組み込むSimulinkDLLを作成した。
今回こそは動かす!
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
復習
さぁ今回こそ動かすんだよね?
その予定だが、予想以上に回数を重ねてしまったので
一回復習しよう。
えー。
すぐ終わるから!
絵で描くと一発だよ。
こんな感じ。
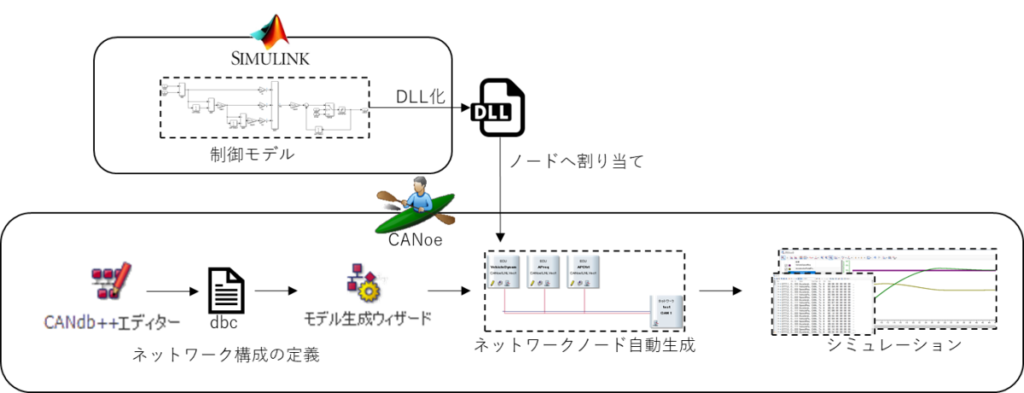
うん。こんな感じ。
長かったなぁ(遠い目)
まだ終わってないよ!
一応、流れも列挙しておこう。
- CANDB++でdbcファイル作成。
- ネットワーク構成、ノード(ECU)構成、メッセージ(CAN)構成、シグナル(交換データ)構成を定義する。
- dbcファイルをCANoeの「モデル生成ウィザード」に喰わせる。
- dbcファイルに定義されているネットワーク構成が自動生成される。
- Simulinkモデルの入出力に「CANoe I/Oを接続」。
- CANoe I/Oはdbcで定義したシグナルに対して割り付けができる。
- SimulinkモデルをDLL化し、CANoeのノードに割り当てる。
- シミュレーション開始。
シミュレーション開始
さぁいよいよシミュレーション開始だ。
よし、動かすよ!
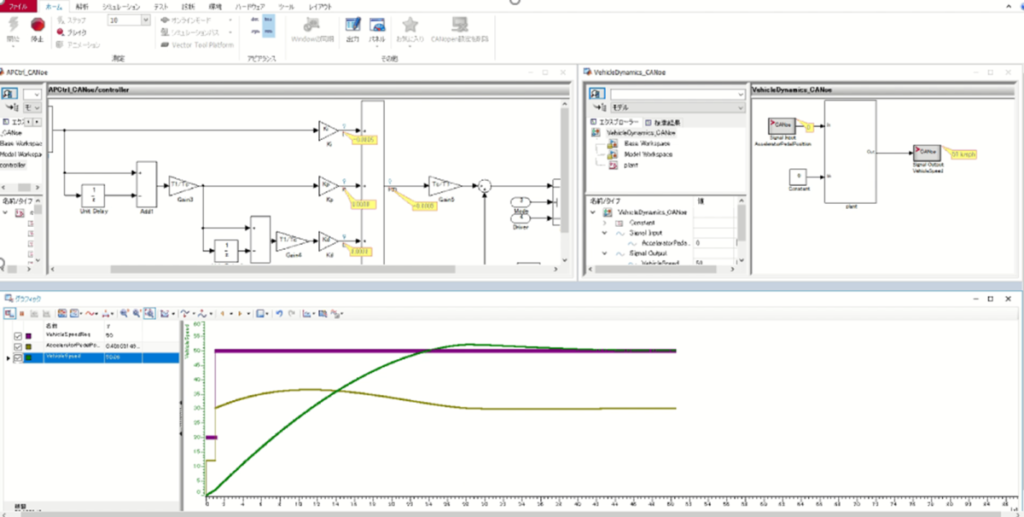
おー。
なんかPIDの動きしてるよ!
しかも、Simulinkモデルが表示されて信号線のところにリアルタイムでデータ表示されてる!
CANモニタも見てみたら?
うん。
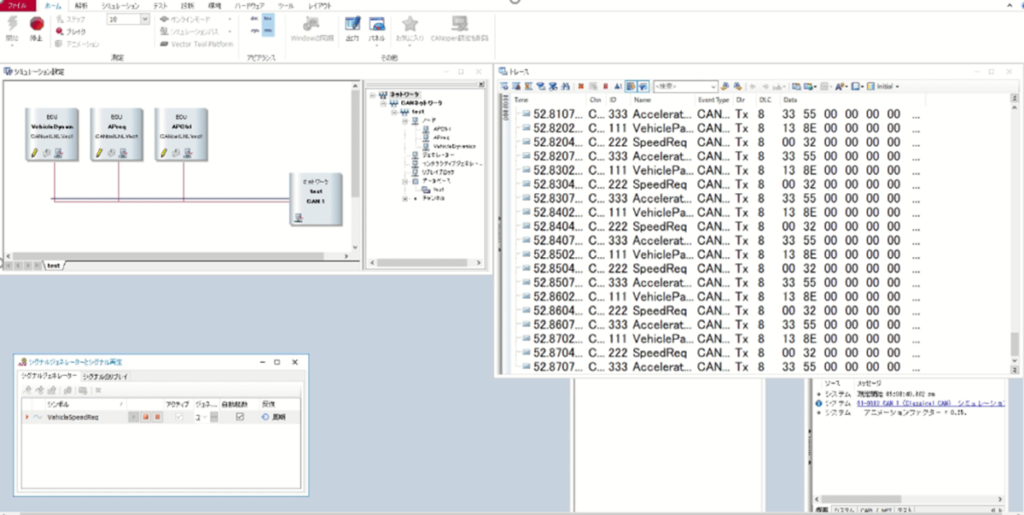
これもしっかり動いてる!
今回はプラント側もシミュレーションしてるけど、
実際に車両とつなぐときはプラント用のノードを無効にすれば良いよ。
そんなこともできるんだ。
シミュレーションバスで疑似的なプラントに対して可能な限りテストをして、
実車時は実バスにしてテストすればいいんだね。
そうそう。
まぁとりあえず動いたけど、実際の仕様を完全に再現したわけじゃないから
あとはうまく調整するんだね。
うん。やり方はわかったからあとは自分で出来そうだよ。
ホントありがとう。
一応、動画版
まとめ
まとめだよ。
- dbc、モデル生成ウィザード、SimulinkDLL、シミュレーションまでの流れを復習。
- そしてやっと動かした!
- あとは徐々に本物と差し替えたりすると応用の幅が広がる。
バックナンバーはこちら
コメント