
バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回まででCANoeを仮想HILS、AUTOSAR-XCPを仮想ECUとした構成にするための作業が一通り完了。
仮想ECU側は従来のままでも動作するが、仮想HILS側を1ms駆動にしたので、
それに合わせて仮想ECU側も1ms駆動になるような修正を入れた。
今回は実際にこの構成で動作確認してみる。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
まずは構成の再確認
今回こそ、動作確認の回だねー。
その前に一旦構成の再確認だ。
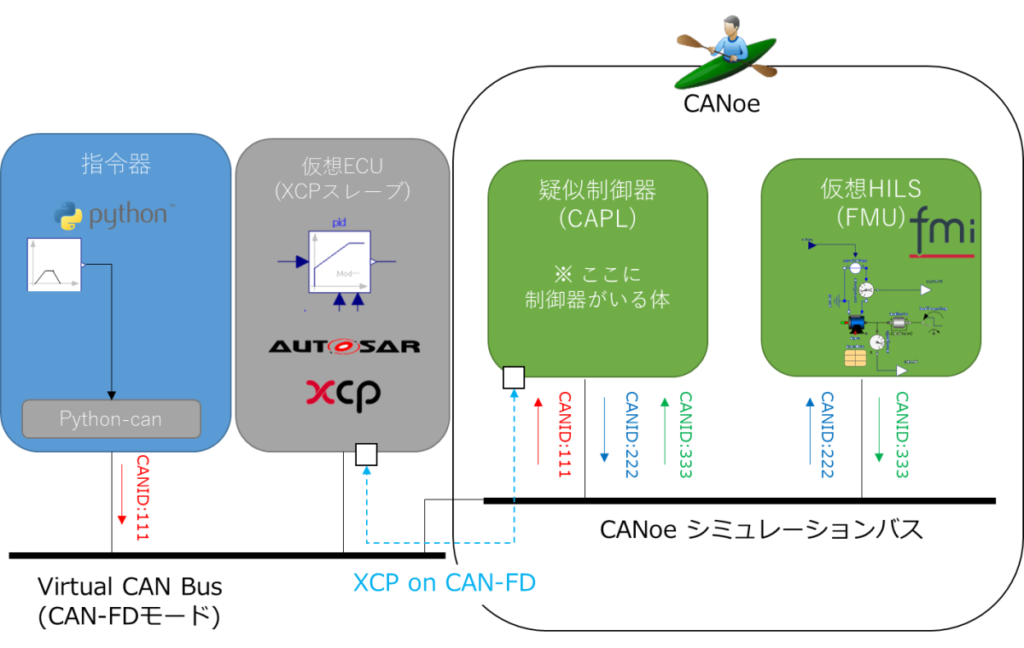
そうそう!
こんな感じで結構ややこしいことになってたんだよー。
これに合わせて調整してきたわけだから、
バグみたいなのが無ければ動く・・・はず・・・。
(地味に自信無いんだな・・・。)
CANoe仮想HILS、AUTOSAR-XCP仮想ECUの動作確認
じゃー、動かすよー。
・・・
おー!
なんか結構キレイな波形が取れた!
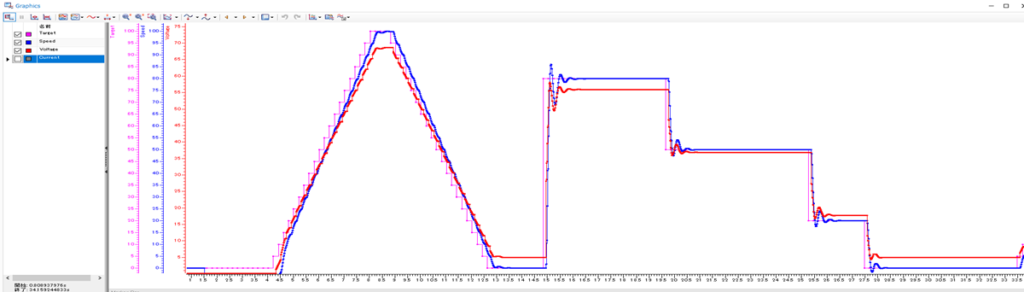
これはCANoe側の仮想HILSが1msで駆動出来てるおかげだね。
ここまでちゃんと動くなら実用でも十分通用しそうだ。
そうだね。
Python環境の場合は応答性がどうしても解決できなかったが、
CANoeならば1msオーダーの応答性にも耐えられるってことがわかった。
今回の仮想HILS達を含めた検証プロセスを考えると?
と、すると検証プロセスで考えると・・・。
以下の流れが作れそうってところか。
- まずはPyFMIベースの仮想HILSで大雑把な動作確認
- CANoeにFMUを読ませた仮想HILSで精度高めの動作確認
- 本物のHILSでさらに精度の高い動作確認
- テストベンチでコンポ―ネント含めた動作確認
- 実車で動作確認
そうだね。
下に行くほど検証の精度は高くなるけど設備の確保が難しい。
その設備の確保の難しさを上側の工程である程度担保して、可能な限り確保難な設備利用を減らす。
ってアプローチだね。
まぁどれだけ本物に近いFMUを作れるかってところもポイントになる気もするけど、
流れとしては手戻りを減らせる良いプロセスになりそう。
とうわけで当初の目的はほぼ完成ってところかな?
あ、そうか。
なんとか低コストでHILSを実現するってのが当初の目的か。
仮想HILSどころか仮想ECUまでやってしまったから目的以上の成果が出た気がする。
まぁHILSの動作確認を使用と思うとECU側も準備しないといけないし、
当然の流れではあるかな。
これで上司に自信もって報告できる。
あとは上手く報告書をまとめてしまえば!
それは太郎くんが頑張ってね。
資料作りだけなら得意だから大丈夫!
ソースコードとか
使用したソースコードはGithubに放り込んである。
1ms駆動対応のAUTOSAR-XCPこと仮想ECU
まとめ
まとめだよ。
- CANoe仮想HILS、AUTOSAR-XCP仮想ECUの実験構成を再確認
- 上記の動作確認実施。
- かなりキレイな波形が取れている。
- CANoe環境であれば1msオーダーの応答性が確保可能。
- Python環境、CANoe環境を検証プロセスに含めると確保難な設備利用の回数を減らす効果が期待できる。
バックナンバーはこちら。


コメント