
バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回はCANoe仮想HILSと仮想ECU連携のロードマップを提示。
以下4手順。
- 指令器disable。
- テストノード追加。
- XCP関連セットアップ。
- DAQ/STIM関連。
これらを一個ずつ片付けていく。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
指令器disable
まずは指令器のdisableだね。
これは簡単。
CANoeの「シミュレーション設定」のウィンドウ内に各ノードが定義されているんで、
disableしたいノードにマウスカーソルを合わせて右クリック。
「ブロックアクティブ」ってパラメータあるんで、それをクリックするとdisableになる。
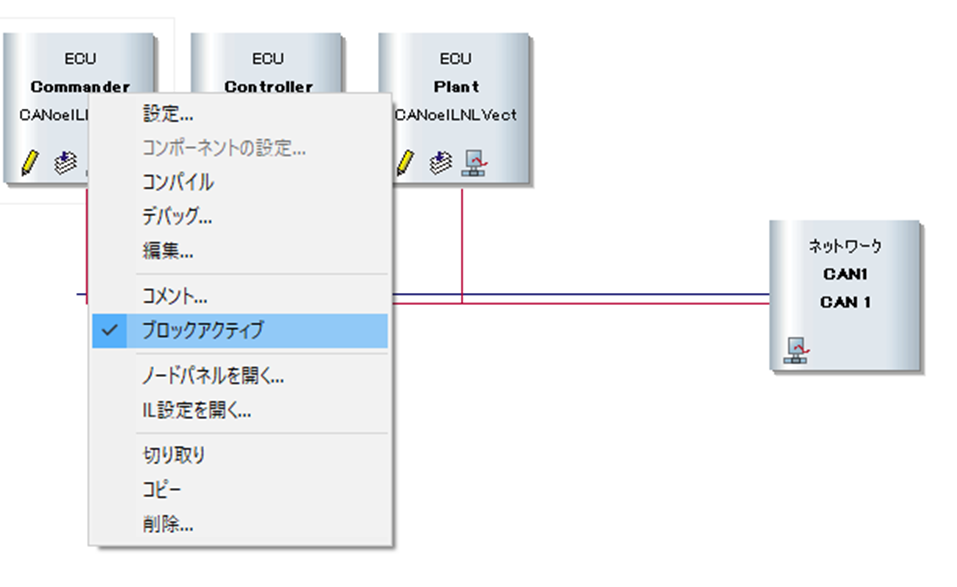
disableにすると、そのノードは機能しなくなるって認識で合ってる?
あってる。
該当ノードに設定しているCAPLやシグナルジェネレータも動作しなくなる。
テストノード追加
次はテストノード追加ってやつだね。
これも簡単で、
同じく「シミュレーション設定」のウィンドウ内のバス上(各ノードを結んでいる線)の上で右クリック。
でてくるポップアップの中の「CAPLテストモジュールを挿入」を選べばOK。
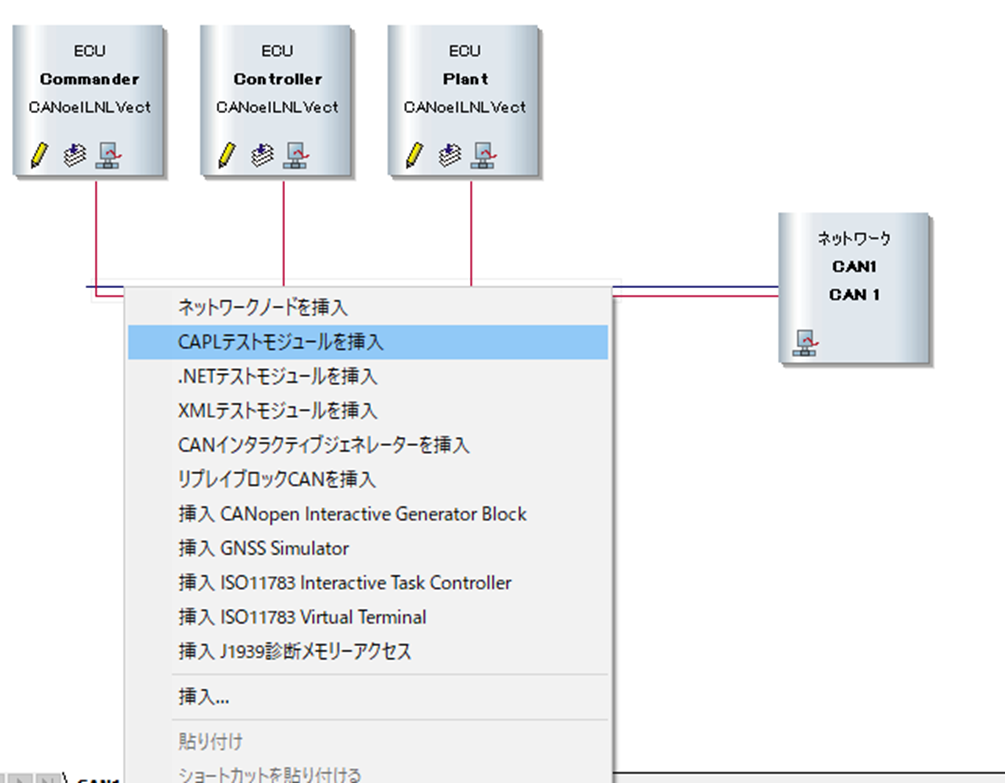
他にも.NETとかXMLのテストモジュールってのもあるみたいだね。
今回は使用しないが、テストモジュールもいろいろバリエーションがあるんだよね。
.NETはC#ベースで記載ができるらしいが、XMLの方は良く知らない。
まぁ今回はCAPLのテストモジュールだからあまり気にしなくてもOKか。
気が向いたときにでも調べてみよう。
まとめ
まとめだよ。
- CANoe上の指令器をdisable。
- シミュレーション設定ウィンドウのノード上でdisable操作が可能。
- CANOe上にテストノード追加。
- シミュレーション設定ウィンドウのバス上で追加操作可能。
- 今回はCAPLテストモジュールを使用。
- .NET、XMLのテストモジュールは気が向いたら調べる。
- 今回はCAPLテストモジュールを使用。
- シミュレーション設定ウィンドウのバス上で追加操作可能。
バックナンバーはこちら。


コメント