バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回、OpenModelicaのライブラリブラウザからDCモータモデルのサンプルを発掘。
とりあえずそのまま動作させて主要なパラメータを確認。
問題無く動作するようだ。
今回は、そのサンプルをちょっと掘り下げていく。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
ModelicaのDCモータモデルの掘り下げ
とあえず、DCモータモデルのサンプルは動いたけど
あんまり理屈はわかってないんだよねー。
以前も貼ったけど、
基本的なのはここから読み取るしかないかなー。

まぁそうなんだろうけど、
今回のモデルとどう紐づくかのイメージが湧かないんだよねー。
なるほど。
じゃー、OpenModelica Connection Editor上の見え方と
各領域の関係性だけ説明するか。
DCモータモデルの各領域
ざっと絵にするとこんな感じだ。
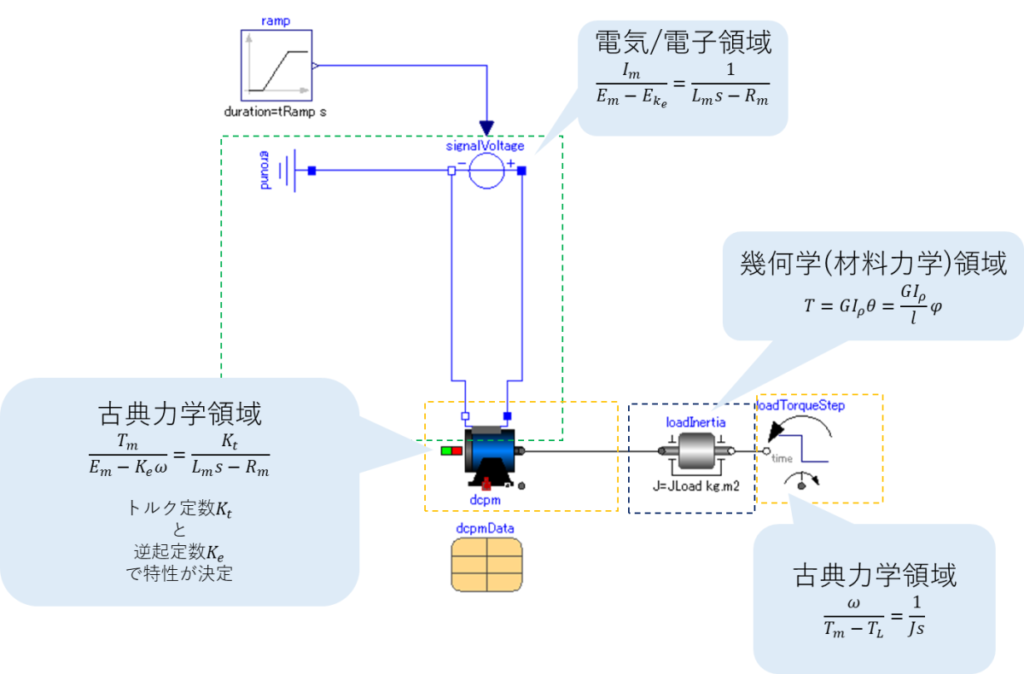
うーんと、
- 電気/電子領域
- 古典力学領域
- 幾何学(材料力学)領域
ってのが絡んでくるのかー。
DCモータモデルもmassモデルと比べたら複雑ではあるが、
それでも最小規模。
最小規模でも領域横断が出てくる。
ホント厄介だよねー。
とはいえ、領域を横断しても理論的に動きが分かるってことだから
昔の人は良く特定したよね。
た、確かに・・・。
計算すれば結果が分かるってのはすごいことかも。
さらにModelicaのような言語でモデリングすれば
細かい理屈は抜きでシミュレ―ションが出来てしまう。
うーん、厄介という発想が失礼ってことかー。
物理モデリングの手順とか
まぁ物理モデリングの手順っておおざっぱに言うと
①伝達経路の定義
②伝達関数導出
③微分方程式の解決
④シミュレーション
の4段階なんだけど、
このうち③を省略してくれてるのがSimulinkとかScilabだねー。
あー確かに演算に関しては悩まなくてよさそうになるよね。
そして、Modelicaは③に加えて②も省略できる。
そっか。
いろんな方程式が最初からモデルに組み込まれてるから
②も省略できるのか。
まぁ微調整とかはいるかもだけど、
①が出来てしまえば②はそれほど悩まないって特性はあるねー。
なるほど。
こう説明してもらえると、
「難しいことをやってる!」
ってイメージから
「難しいことを簡単にできるようにしてる!」
ってイメージが強くなるね。
今後の方針
今後の方針としては、
やはりDCモータモデルを少し紐解いた方が良いかなって思ってる。
うーん、まぁその方がいいのかなー。
まぁ細かい理屈というより、こういう工夫がされてるよー。ってあたりだから、
何かを理解しなきゃいけないって話にはならないと思うよ。
だったら、OKだ!
(うーん、そういう反応されるのもちょっとアレだな・・・。)
まとめ
まとめだよ。
- ModelicaのDCモータモデルをちょっと掘り下げ。
- 以下が絡んでくる。
- 電気/電子領域。
- 古典力学領域。
- 幾何学(材料力学)領域。
- 以下が絡んでくる。
- 物理モデリングは伝達経路、伝達関数、微分方程式解決、シミュレーションの4つの工程がある。
- Modelicaは伝達関数、微分方程式解決をサボれるツール。
バックナンバーはこちら。


コメント