バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回までで仮想HILSと仮想ECUのXCPonCANFD対応が終わり、
全体構成も確認した。
よって、ついに今回が動作確認!!
(まぁあんまり望まれた結果にはなってないんだけど)
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
仮想HILSと仮想ECUのXCPonCANFD対応の動作確認
もう残すは実際の動作確認のみだね。
もうさっとやってしまおう。
じゃー動かすねー。
仮想HILSと仮想ECUのXCPonCANFD対応の動作確認結果
動作結果の波形をキャプチャした。
仮想HILS側と仮想ECU側の両方だね。
仮想HILS側(XCPonCANFD対応版)
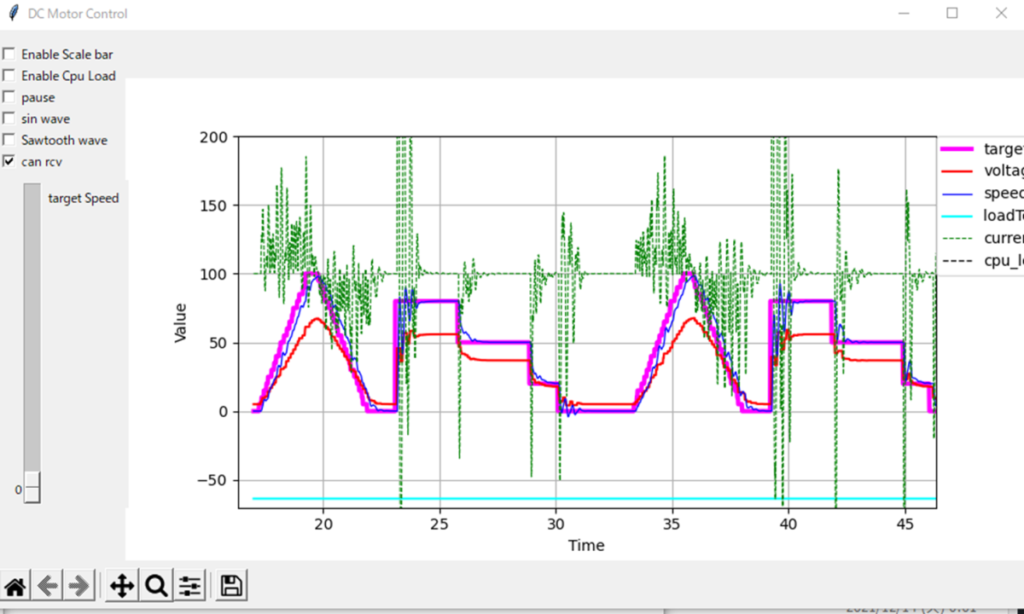
仮想ECU側(XCPonCANFD対応版)
![仮想ECU XCPonCANFD対応版動作結果、Figure 1、target[rad/s]、voltage[V]、speed[rad/s]、Value、Time](https://www.simulationroom999.com/blog/wp-content/uploads/2022/01/03_仮想ECU-XCPonCANFD対応版動作結果-1024x666.png)
これは・・・問題無く動いているとは言えるのだろうが・・・。
うーむ。
以前やった、XCPonCANの時の波形と見比べてみよう。
仮想HILS側(XCPonCANFD対応版)
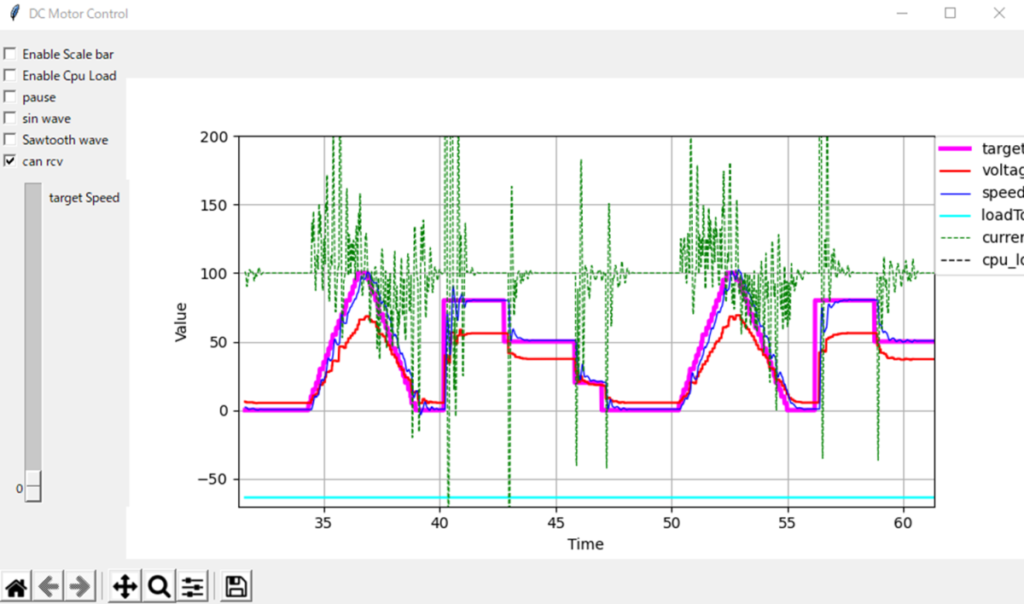
仮想ECU側(XCPonCANFD対応版)
![仮想ECUの内部状態をXCPリスナーで拾った波形、Target[rad/s]、voltaget[V]、speed[rad/s]](https://www.simulationroom999.com/blog/wp-content/uploads/2021/12/03_仮想ECUの内部状態をXCPリスナーで拾った波形-1024x665.png)
・・・。
・・・。
(ぜんぜん変わらねーな。)
(ぜんぜん変わらねーな。)
考察
というわけで、変数の精度は全く関係無かったってことになるな。
あれだけ苦労したのに。
でもまぁXCPのCAN-FD版なんてあんまり見る機会無いから、
これはこれで面白いものが見れたと思ってあきらめよう。
まぁPythonで無理やり動かしているものだし、
限界はあるってことだよね。
今回は扱う変数がかなり少なかったけど、
実際のECUとHILSだともっと大量の信号が出てくるから、
そういう環境ならCAN-FDの恩恵は得られだろう。
そういう意味では未来の課題を今のうちに解消できたともいえるのか。
そうそう。
なんとなく失敗した感じだけど、失敗した中にも得られたものも多いし、
むしろ失敗したんだから意地でもなにか得ないとね。
そうね。
それが成長の秘訣ってやつだよね。
(よし。無理やり良い感じに終わらせた!)
ソースコードとか
使用したソースコードはGithubに放り込んでおいた。
AUTOSAR-XCP CANFD対応版
PyXCP CANFD対応版実験
仮想HILS CANFD対応版
まとめ
まとめだよ。
- 仮想HILSと仮想ECUのXCPonCANFD対応の動作確認は結果としては失敗に終わった。
- 変数の精度向上はあまり性能向上にはつながらなかった。
- しかしXCPonCANFDを直に見るのも珍しい体験なので、これはこれで将来に生かすって発想が大事。
- 失敗したからこそ意地でも糧になるものを拾うべし。
バックナンバーはこちら。


コメント