
バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回は仮想HILS側の修正後のコード開示。
これでXCPonCANFD対応に必要な修正は完了したつもり。
しかし、構成要素がいろいろあるので、
動作実験前に一旦全体構成について再確認する。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
XCPonCANFD対応に於ける想定される仮想HILS、仮想ECUの全体構成
今回は、動作確認前の全体構成確認だね。
うん。
この修正作業の前に全体構成は確認しているが、
どこをどう弄ったかも含めて確認しようと思う。
この修正前の想定全体構成はここで確認してたね。

まぁ構成自体はこの時と変わってはいないけどね。
XCPonCANFD対応に於ける仮想HILS、仮想ECUの全体構成(ネットワーク構成)
で、実際の全体構成に今回の修正作業分の注釈をつけたのがこれ。
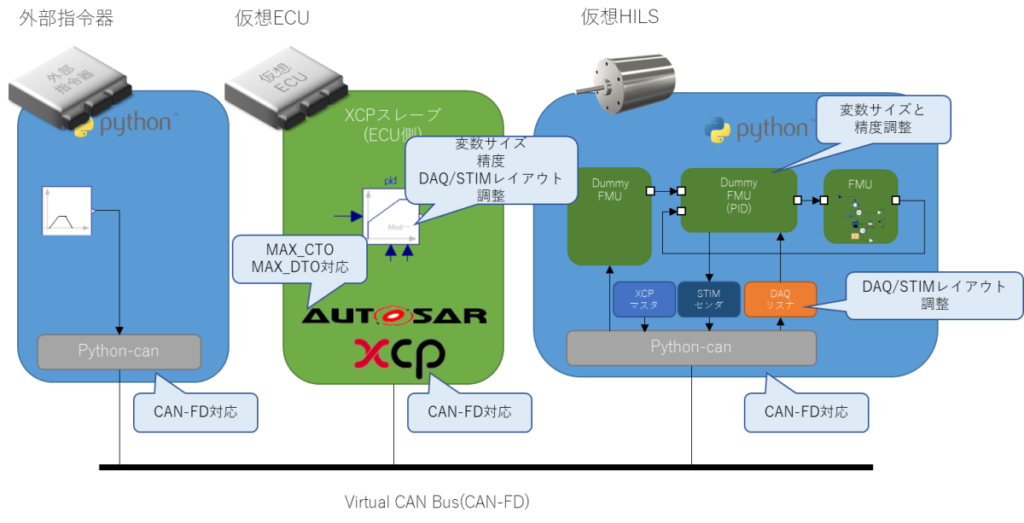
こうしてみるといろいろと広範囲で修正したんだなぁ・・・。
あくまでインターフェース部分だけではあるんだけどね。
内部の主要ロジックは手を入れていない。
確かに。
それを考えると「楽だった」って感想に変わるかも。
まぁPyXCPのCAN-FD対応が未完全なところで苦しめられたけどね。
あー、それがあったか。
あれは予想外だった。
XCPonCANFD対応に於ける仮想HILS、仮想ECUの全体構成(論理構成)
次は論理構成。
といってもCANがCAN-FDに、XCPonCANがXCPonCANFDに変わったってのを示してるだけなんだけど。
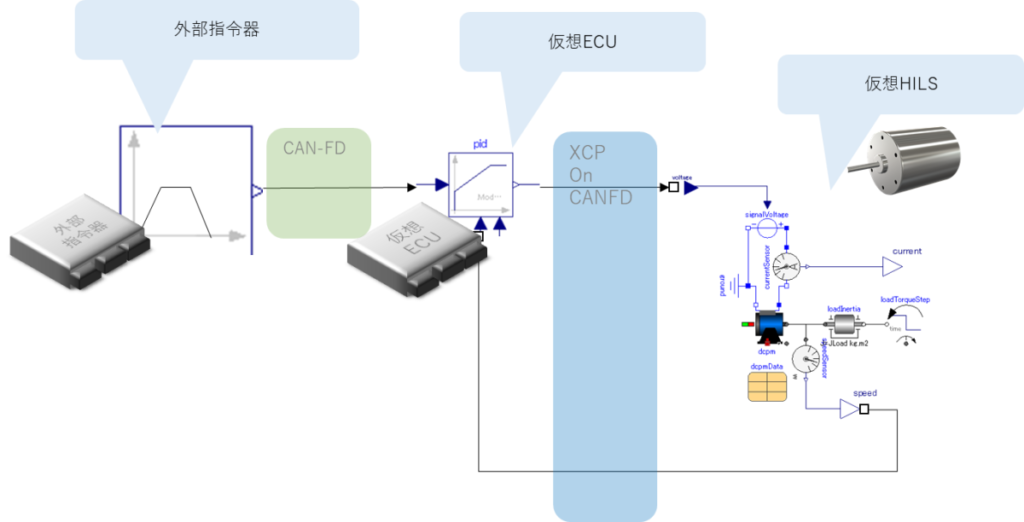
こっちは信号線の繋ぎが変わっただけってのを示してる感じだね。
主要な内部ロジックは触ってないよってのが分かる構成図になるね。
その通り。
論理構成は変わってないので、依然と同様の結果は得られるはず。
って理屈になる。
まぁ変数サイズと精度が変わってるんで、そこら辺の効能は動作確認しないとわからないけど。
そこはちょっと期待って感じだね。
というわけで、ついに次回が動作確認回だ。
まとめ
まとめだよ。
- XCPonCANFD対応に於ける当初想定していた仮想HILS、仮想ECUの全体構成と実際の全体構成。
- 基本的には想定通りの修正。
- PyXCPのCAN-FD対応が難航したのが想定外ってくらい。
- 基本的には想定通りの修正。
- 論理構成としては変わらず。つまり基本的な動作は変わらないはず。
- 変数のサイズと精度が変わっているのでそれの効能を期待。
バックナンバーはこちら。


コメント