
バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回はforceブロックとtrapezoidブロックをライブラリブラウザから探し出した。
それをとりあえずそのままmassモデルに接続。
特にtrapezoidのパラメータは変更せず、変数等も設定していない。
シミュレーションしつつ、どう調整できるのか・・・。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
とりあえずシミュレーション
前回、特にtrapezoidの設定もせず、間に変数を入れることもしなかったけど、
このままでよいのかな?
まぁ大きなモデルじゃないから
再度モデルチェック、コンパイルが入ってもそんなに気になるような時間は取られないとは思うけど。
まぁとりあえずシミュレーションしてみよう。
うん。
やってみた。
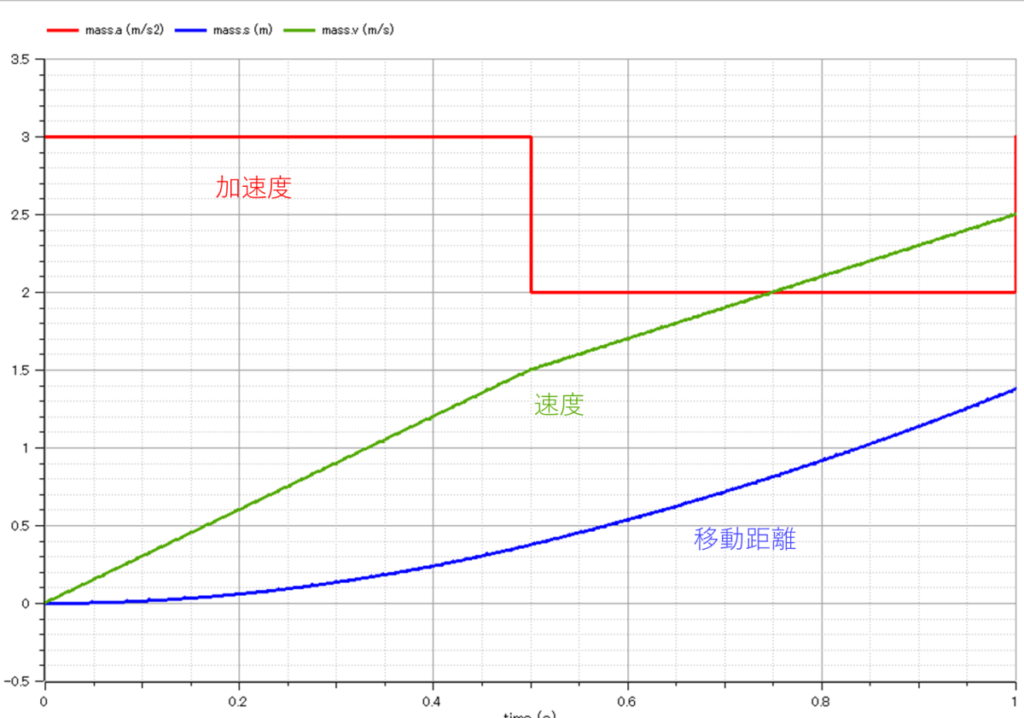
加速度が力と比例関係にあるから、
矩形波的な力が加わってる状態なんだろうなー。
trapezoidのパラメータを変数ブラウザからどうみえるか
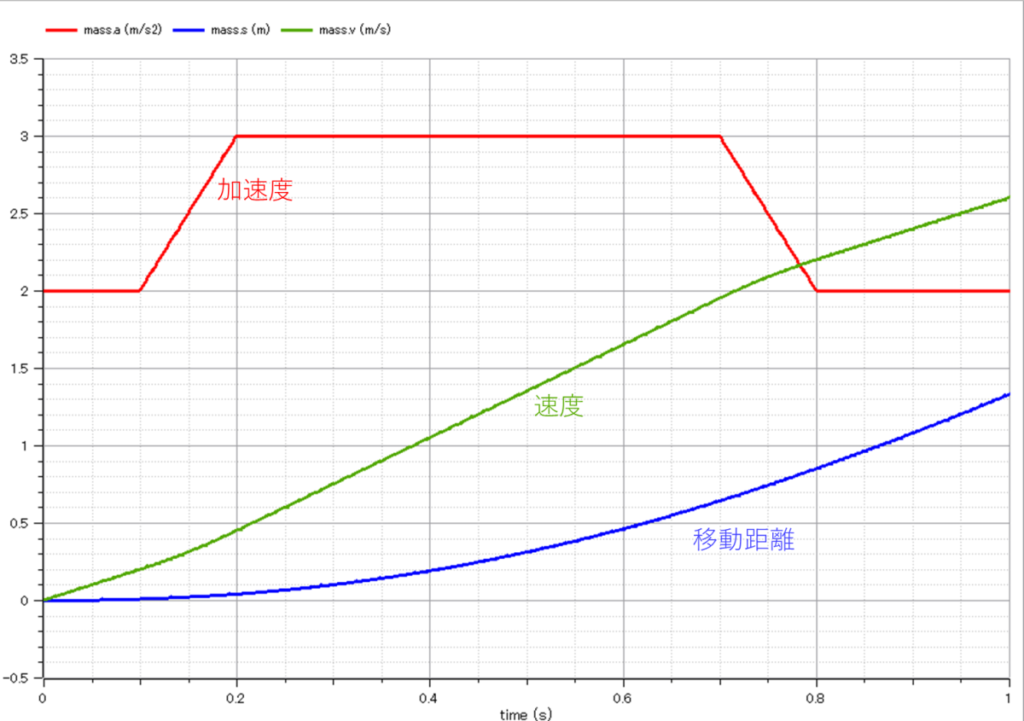
じゃ、変数ブラウザのtrapezoidを見てみよう。
あれ?
ほとんどの変数が編集できそうだね?
y (Connector of Real output signal)ってのは変更できないようだけど。
そう。
trapezoidはほとんどのパラメータが後で編集できるんで、
わざわざ変数を間に入れなくてもOKってこと。
ちなみに、y (Connector of Real output signal)は演算後の出力なんで
パラメータとは別物だね。
なるほど。
それで特にtrapezoidのパラメータ編集も変数の追加もしなかったのか。
trapezoidのパラメータを編集
じゃ、trapezoidのパラメータを以下に変更
- falling:\(0.1[s]\)
- rising:\(0.1[s]\)
- startTime:\(0.1[s]\)
変更した。
じゃー再シミュレーション。
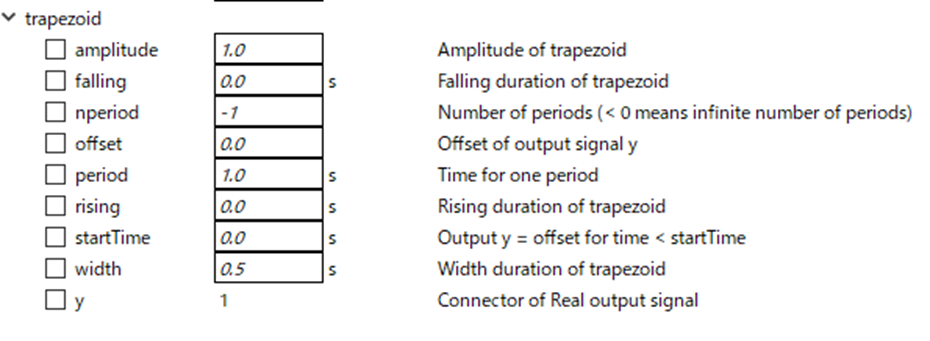
あ、結構かわったぞ。
加速度の動きが台形波っぽくなってる。
開始\(0.1[s]\)
立ち上がり\(0.1[s]\)
立下り\(0.1[s]\)
で変数ブラウザで変更した通りになってるね。
こんな感じで、最初からパラメータ変更を想定したソースブロックもあるよー。
ってことだねー。
なるほど。
これは知ってる知らないで結構サボり方が変わりそうだね。
今後の方針
で、次はどうするの?
うーん、ちょっと複雑なモデルを触ってみおうかと思ってる。
例えば?
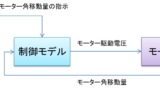
DCモータモデルあたりが調度良いのかなって思ってる。
なんとなくと特性も以前の別のシリーズでやってるし。
たしかにDCモータは何回かみたことあるなー。
ここらへんとか。

でもゼロからModelicaで書くのは大変そうだなー。
一応サンプルがあるから、それベースで進める予定。
だからそんなに心配しなくてもOKだ。
なんだ。
じゃーなんとかなりそう。
まとめ
まとめだよ。
- trapezoidの設定もせずにおもむろにシミュレーション。
- 矩形波的な出力になった。
- 変数ブラウザでtrapezoidの設定を編集。
- 台形波的な出力に変化。
- このように、変数ブラウザからパラメータ変更が可能なソースブロックはそこそこある。
- これらを知っているといろいろとサボれて楽できる。
バックナンバーはこちら。


コメント