バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
XCP Basicは無償だが、無償であるが故に機能制限がある。
特にSTIMの使用不可が大きい。
一応DOWNLOADで代替可能だが、スループットがどうしても落ちる。
しかし、XCPの実装がそれなりに使えるのは事実であり、
まずはXCP Basicを動作させるべく計画を練っていく。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
XCP Basic動作までの方針
XCP Basicを動作させてみるってところは決まったけど、
どういう手順で進める?
そうだねー。
ざっくり以下の順番かな。
- 実験構成を決める。
- XCP Basicを入手。
- ビルドしてみる。
- 適当にXCPコマンドを叩き込む。
- メモリアクセス周りの微調整をする。
- 処理周期の精度を引き上げる。
- ちょっと真面目にXCPコマンドを叩き込む。
- DAQの挙動を見る。
「メモリアクセス周りの微調整」
「処理周期の精度を引き上げ」
ってのが良く分からん。
まぁ私もざっくりしか見て無いから不要かもしれないが、
たぶん手を入れないと期待する動作にならないかもー。
ってところを作業として差し込んだ感じだ。
良く分からんが、
その作業をやるタイミングになったら押してもらえるってことかな。
そうだね。
確認してみて問題が無ければラッキー。
程度に思っておけば良いよ。
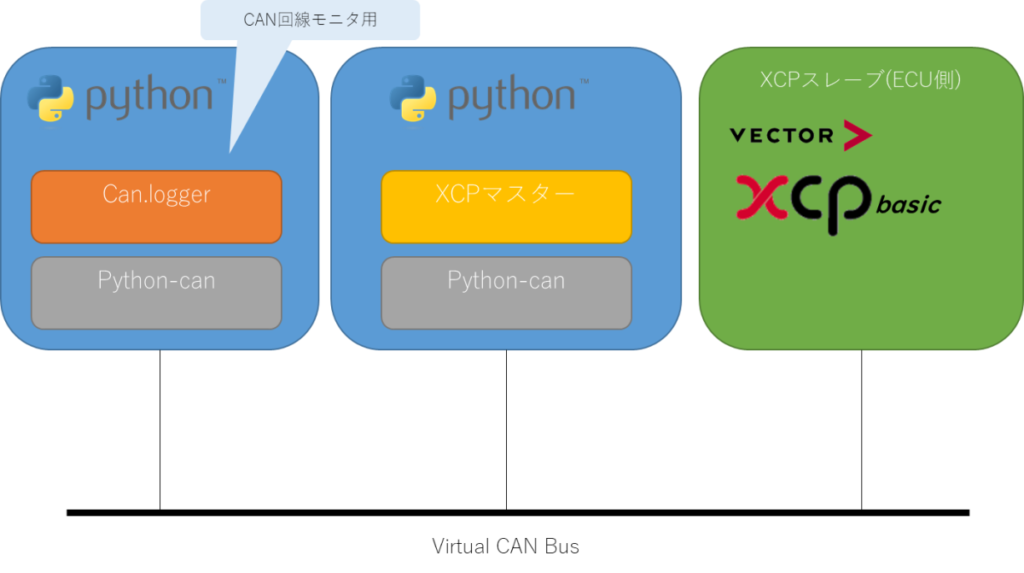
XCP Basicの実験構成
まずは実験構成を決めておこう。
そうだね。
何が必要になりそうかあたりを付けておいた方が良いよね。
まぁそれほど真新しいものは必要無いと思っているが、
一応以下の構成をを想定している。
あ!
またPython-CANを使うのか!
そうだね。
お手頃にCANの送受信をするには打ってつけのツールだ。
そして、CANバスは恒例のVirtual CAN Busだね。
うん。
もうこれに慣れてしまうと楽過ぎて離れられない。
そのまま実バスに変えてもほぼ動いちゃうから楽だよねー。
それにいきなり実バスだと論理的な正しさの前に物理的制約も意識することになるから、
最初のうちはVirtual CAN Busを使用した「論理的な正しさ」に注力したいし。
まぁあるものは利用しないとだね。
まとめ
まとめだよ。
- XCP Basic動作までの方針を決めた。
- 数点、要否が確定できない作業があるが、実際に確認してみてから決める。
- 実験構成を提示。
- CANの制御はPython-CANを使用。
- 単純な送受信であればお手軽。
- 恒例のVirtual CAN Busを使用。
- 物理的な制約を一旦無視して論理的な正しさを求める場合はこれが一番楽。
- CANの制御はPython-CANを使用。
バックナンバーはこちら。


コメント