![[CAN-FD] Vehicle Diagnostic Communication Part 96 [AUTOSAR 1]](https://www.simulationroom999.com/blog/wp-content/uploads/2023/01/01_eyecatch-20.png)
Click here for back issues.
https://www.simulationroom999.com/blog/diagnostic-communication-en-back-issue/

Introduction.
The policy for simulation of CAN-FD in AUTOSAR will be explained.
Simulation Policy
I plan to simulate the CAN-FD version of AUTOSAR-CanTp.
However, we already have a combined CanTp and Dcm, so we will only need to do one simulation.
Foreshadowing?
The AUTOSAR CanTp and Dcm used previously are as follows.
- CanTp is A-ComStack, r4.x series.
- Dcm is OpenSAR, r3.x series.
CanTp is also included in OpenSAR, but the use of A-ComStack for the r4.x series was foreshadowed for this article.
OpenSAR is an r3.x series, but the r3.x series does not contain the CAN-FD specification to begin with.
A-ComStack’s r4.x series includes the CAN-FD specification.
And since Dcm does not care whether the lower layer is CAN or CAN-FD, it does not matter whether it is r3.x or r4.x.
In other words, we used A-ComStack, the r4.x series CanTp, for the use of CAN-FD.
OK! Safe foreshadowing!
Flow of doing
The following flow will be explained and then the simulation will be performed.
(1) Configuration of CanTp for CAN-FD
(2) Configuration of Dcm
(3) Simulation
Dcm should not be CAN or CAN-FD dependent, but I will make some adjustments.
I will explain this while going through the CanTp configuration, since it is not a big deal.
Simulation configuration
The simulation configuration is the same as for CAN.
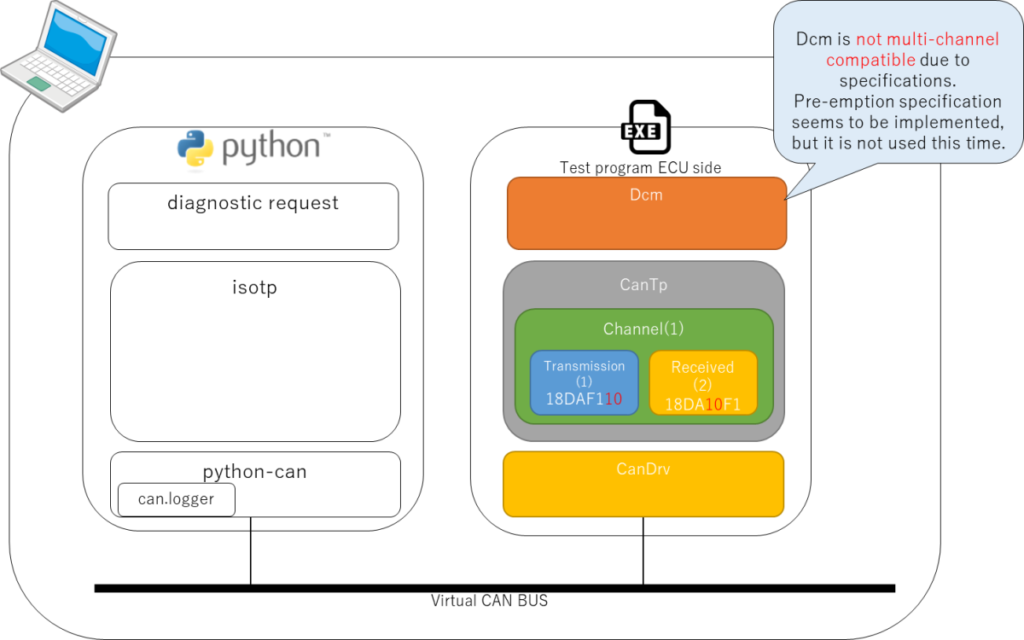
Even if CAN becomes CAN-FD, there is not much to be changed.
The logical specifications themselves have only changed from a maximum of 8 bytes to a maximum of 64 bytes, and each layer absorbs the differences in specifications, so there is not much to do as it goes to the higher layers.
I think it’s really well done.
Conclusion.
- The policy is to do AUTOSAR-CanTp and AUTOSAR-Dcm CAN-FD simulations at once.
- The reason for using A-ComStack in r4.x for CanTp was to support CAN-FD. (Foreshadowing!)
- The simulation configuration is exactly the same as for CAN.
- Benefit of layered architecture.
Click here for back issues.


コメント