![[CAN-FD] Vehicle Diagnostic Communication Part 87 [python-can 1]](https://www.simulationroom999.com/blog/wp-content/uploads/2023/01/01_eyecatch-11.png)
Click here for back issues.
https://www.simulationroom999.com/blog/diagnostic-communication-en-back-issue/

Introduction.
Explanation toward simulation of CAN-FD in python-can.
Simulation configuration
Let’s try to control CAN-FD with python-can.
First, let’s check the simulation configuration.
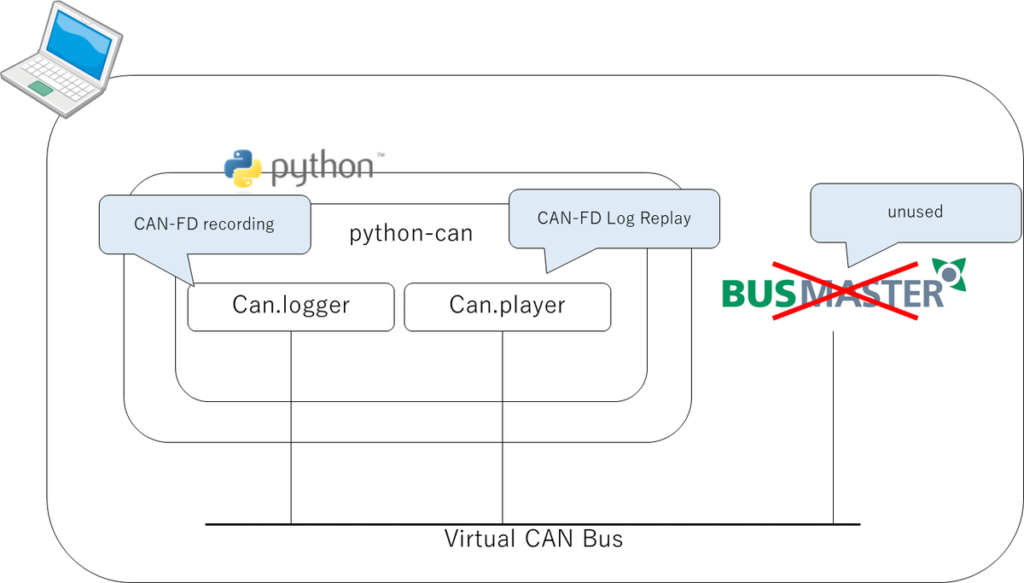
BusMaster is not used in this case.
Or rather, it cannot be used.
The reason is that it does not support CAN-FD.
It is said that it is possible to support CAN-FD with add-ons, but it will probably incur some costs.
Difference between CAN and CAN-FD usage in python-can
Let me explain the difference between CAN and CAN-FD usage in python-can.
Basically, there is no big difference.
There is only an option for CAN-FD.
The format of asc played by can.player is different between CAN and CAN-FD, so some adjustment may be necessary.
However, I have not tried it yet, so I am aware that this is probably the extent of the difference.
Asc format for CAN-FD
The asc format of CAN-FD is as follows.
// CAN
0.010000 1 111 Rx d 8 11 22 33 44 55 66 77 88
// CAN-FD
0.000000 CANFD 1 Rx 111 1 1 d 8 11 22 33 44 55 66 77 88It is similar, but with slightly more parameters.
The breakdown of the parameters is as follows.
0.000000(timestamp) CANFD 1(line) Rx 111(CANID) 1(FDF) 1(BSR) d 8 11 22 33 44 55 66 77 88
The two “1″s along the way indicate the FDF and BSR bits.
Well, let’s actually run it next time.
If I’m wrong, I’ll investigate again then.
Conclusion.
- BusMaster does not support CAN-FD.
- The asc format of CAN-FD is different from CAN.
- FDF bit and BSR bit parameters are added.
Click here for back issues.


コメント