
バックナンバーはこちら。
https://www.simulationroom999.com/blog/diagnostic-communication-backnumber/

はじめに
AUTOSARでのCAN-FDのシミュレーションの方針について。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
シミュレーション方針
流れとしては、AUTOSAR-CanTpのCAN-FD版のシミュレーションになるのかな?
そうなんだけど、
すでにCanTpとDcmが結合したものがあるんで、
シミュレーションとしては1回にまとめようと思ってる
ほー。1回で済むのはありがたいかな。
伏線回収???
ん?
そういえば、AUTOSARのCanTpとDcmって
CanTpがA-ComStackでr4.x系。
DcmがOpenSARでr3.x系。
って感じになってて、なんで違うrevisionを組み合わせたんだっけ?
なんだっけ?
ここらへんでなんか伏線っぽいこと言ってたじゃん!!

んーーー?
あー?
おー??
ぇえ?
(ついに頭がイカレ・・・)
あ!
思い出し・・・。
いや、覚えてたよ!!!
(絶対忘れてたよこれは。)
で、なんでr4.xとr3.xを混ぜたの?
OpenSARがr3.x系なんだけど、r3.x系はそもそもとしてCAN-FD仕様が入っていない。
A-ComStackのr4.x系は、CAN-FDの仕様が入ってる。
そして、Dcmは下層がCANかCAN-FDか関係無いのでr3.xでもr4.xでもどっちでも良い。
あー!なるほど。
CAN-FDの利用を想定してA-ComStackことr4.x系のCanTpを使用したってわけか。
r4.x系でオープンソースなDcmが無かったんでr3.xのOpenSARのDcmと使ったと。
その通り。
よし!無事伏線回収!!!
(いやーこれは危うくスルーする流れだったよー)
やってく流れ
伏線も回収したわけで、
あとはどうやっていくかだけど。
以下の流れで説明してから一気にシミュレーションって感じかなー。
①CanTpのCAN-FD向けコンフィグレーション
②Dcmのコンフィグレーション
③シミュレーション
DcmはCAN-FD関係無いようなこと言ってたけど、なんか調整するの?
大したことはしないんでCanTpコンフィグレーションのついでに説明するよ。
シミュレーション構成
シミュレーション構成はCANの時と一緒で良いのかな?
全く一緒だね。
一応、構成を載せとく。
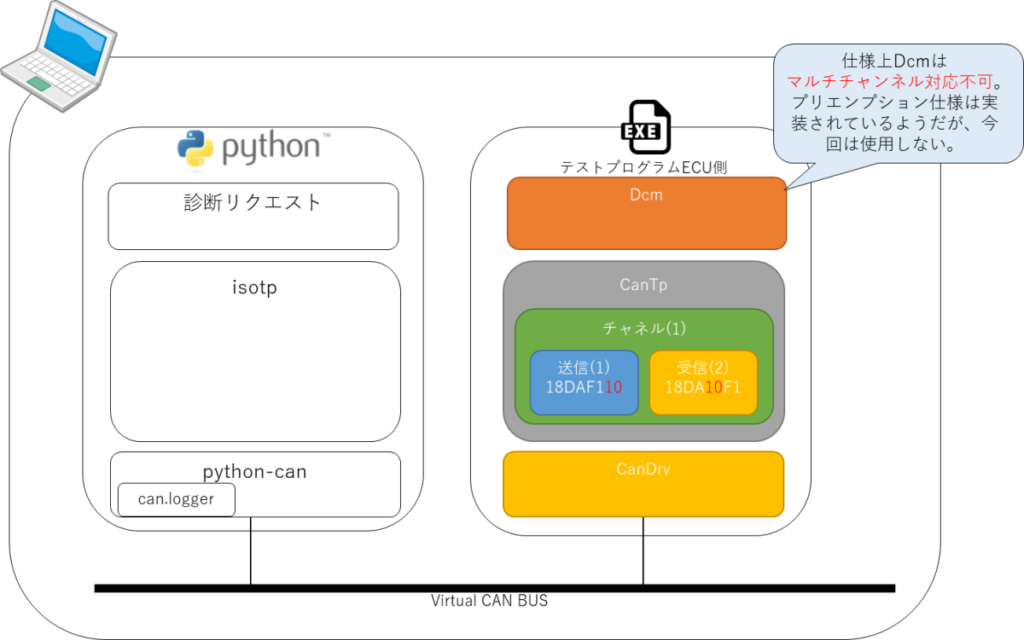
CANがCAN-FDになってもあんまり大きく弄るところって無い感じだねー。
ちょっと意外。
まぁ論理的な部分の仕様自体は最大8byteが最大64byteに変わっただけだし、
各層で必要な分を吸収しちゃうんで、上位層に行くほどやることはないって感じ。
いやーホント良くできてるよーって思う。
まとめ
まとめだよ。
- AUTOSAR-CanTpとAUTOSAR-DcmのCAN-FDシミュレーションは一括でやってしまう方針。
- CanTpをr4.xのA-ComStackを使用していたのはCAN-FDに対応するため。(伏線回収!)
- シミュレーション構成はCANの時と全く一緒。
- レイヤードアーキテクチャの恩恵。
バックナンバーはこちら。


コメント