
バックナンバーはこちら。
https://www.simulationroom999.com/blog/diagnostic-communication-backnumber/

はじめに
python-canでCAN-FDのシミュレーションに向けての話。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
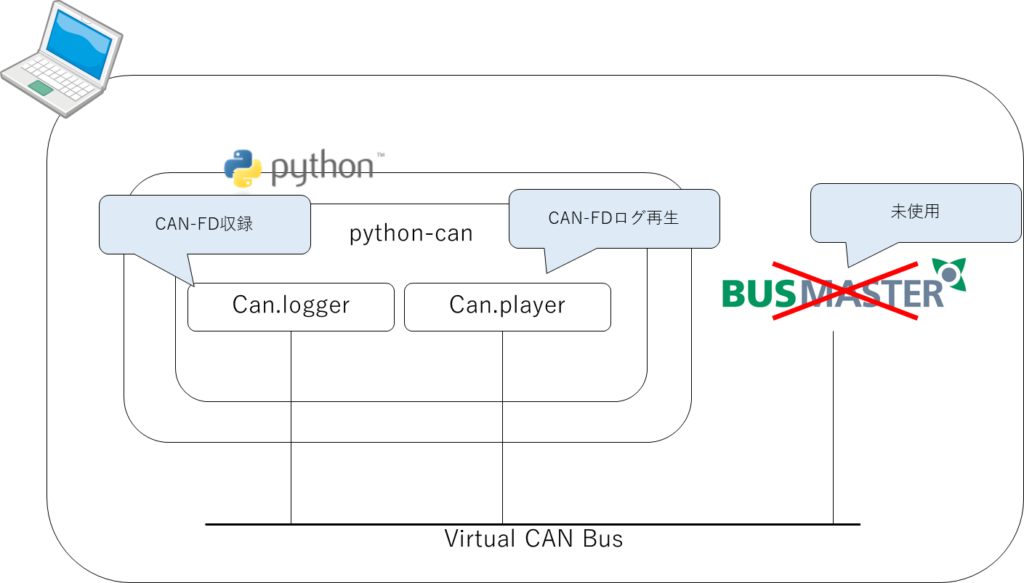
シミュレーション構成
じゃー、まずはpython-canでCAN-FD行こうか―。
おー。
まずはシミュレーション構成。
あれ?
BusMasterは使わないの?
今回は使わない。
というか使えない。
CAN-FDに対応してないんだよねー。
ほー。そうなんだー。
python-canのCANとCAN-FDの使い方の違い
で、python-canを使う上でCANとCAN-FDの使い方に差ってあるの?
基本的には無いと思ってる。
CAN-FD用のオプションを付けるくらいじゃないかなー。
あとは、can.playerで再生するascのフォーマットがCANとCAN-FDで違うからそこら辺の調整はいるかもしれないねー。
じゃー、そこらへんの調整をして
一気に動かしてオッケーって感じか。
まだ試してもないんで「たぶん大丈夫」くらいかなー。
(また不安になるようなことを・・・。)
CAN-FDのascフォーマット
で、CAN-FDのascフォーマットってどんな感じになるの?
雰囲気としては以下な感じ。
// こっちがCAN
0.010000 1 111 Rx d 8 11 22 33 44 55 66 77 88
// こっちがCAN-FD
0.000000 CANFD 1 Rx 111 1 1 d 8 11 22 33 44 55 66 77 88似てはいるけど、パラメータがちょっと増えてるイメージ?
パラメータの意味とかはわかるの?
まぁ予測になるけど、
0.000000(タイムスタンプ) CANFD 1(回線) Rx 111(CANID) 1(FDF) 1(BSR) d 8 11 22 33 44 55 66 77 88
ってことだと思う。
あーなるほど。
途中にあった二つの”1″はFDFビットとBSRビットを示してるね。
まぁ次回実際に動かしてみよう。
ダメだったらその時ってことで。
(うーん、大丈夫か?)
まとめ
まとめだよ。
- BusMasterはCAN-FDには対応していない。
- CAN-FDのascフォーマットはCANとは異なる。
- FDFビットとBSRビットのパラメータが増えている。
バックナンバーはこちら。


コメント