
バックナンバーはこちら。
https://www.simulationroom999.com/blog/diagnostic-communication-backnumber/

はじめに
ISO-TPのシミュレーションをしよう。のシリーズ。
Virtual CAN BusをBusMasterで制御してみる。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
BusMaster
前回、Virtual CAN Busのセットアップをしたわけなのだけど、
これに対いて割と簡単にアクセスする方法がある。
XLドライバライブラリのサンプルを使うんじゃないの?
それよりも使い勝手は良いかな。
BusMasterというオープンソースなツールを使う。
BusMaster

ん?
そんなのあったんだ。
中々なの完成度で、これあったらCANalyzerとか要らないんじゃん?
って思っちゃう。
思っちゃうって・・・。
実際はどうなの?
なんか制約があったりするんじゃない?
CANに関しては十分なんだけど、
CAN-FDに対応してないんだよね。
まぁ今回はCANしか使わない予定なんで、
BusMasterで十分と言えるかな。
とりあえず、BusMasterはインストールしておくね。
BusMasterでVirtual CAN Busに接続してみる。
じゃ、BusMasterをVirtual CAN Busに接続してみる。
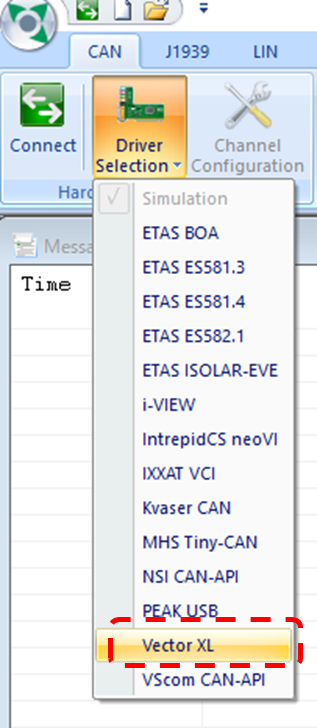
まず「Driver Selection」から「Vector XL」を選択。
「Vitual Channel1」、「Vitual Channel2」を
「Configured CAN Hardware」側に持ってくる。
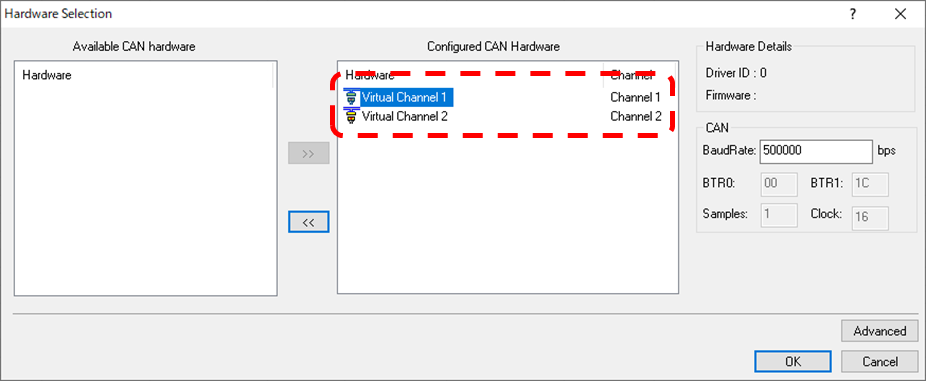
Connectボタンを押すとCAN回線モニタが開始する。
なにも出てこないよ?
まぁ何も流れてないからね。
前回使ったxlCANcontrolで適当なCANフレームを送出してみると良いよ。
わかった。

お、
xlCANcontrolからSendボタンを押すたびに更新されたぞ。
問題無くモニタできているようだね。
これって、普通のデバイスでも一緒なの?
一緒だよ。
というかBusMaster的にはVirtual CAN Busに繋がっていると思っていなくて、
普通のVector社製デバイスに繋がっていると認識していると思うよ。
ってことは、
CANoeとかCANalyzer無しでCAN回線モニタができるってことになるね。
その通り。
これが冒頭で言っていた、
「これあったらCANalyzerとか要らないんじゃん?」
って話になるのか。
確かにこれがあればいろいろなことは出来てしまいそう。
CANoeのようなノードシミュレーションの概念もあるからね。
使い熟せればほとんどのことは出来るだろうね。
もしかして、このBusMasterがPythonで作られているとか?
うんにゃ。
BusMasterはC++で組まれているっぽいね。
あれ?
なんかPythonでいろいろやるようなこと言ってたから
BusMasterがそうなんだと思ってた。
Pythonだけだとハマった時の解析がメンドーなんでね。
BusMasterも一緒に使っていこうと思ってる。
あー確かに。
BusMasterで同時にモニタできた方が理解し易そうだしね。
まとめ
まとめだよ。
- BusMasterのセットアップをした。
- BusMasterでVirtual CAN Bus上のCANフレームをモニタした。
バックナンバーはこちら。


コメント