https://www.simulationroom999.com/blog/derivation-of-motor-transfer-function/
伝達関数の応用
場合によって、伝達関数ブロックを使用できない局面があり得る。
- 伝達関数の中間の帰還パラメータが変動し得る。
- 制御モデルの推定で使用するため離散化されている必要がある場合。
- 自前のHILSっぽい装置で、やはり離散化されている必要がある場合。
伝達関数の分解
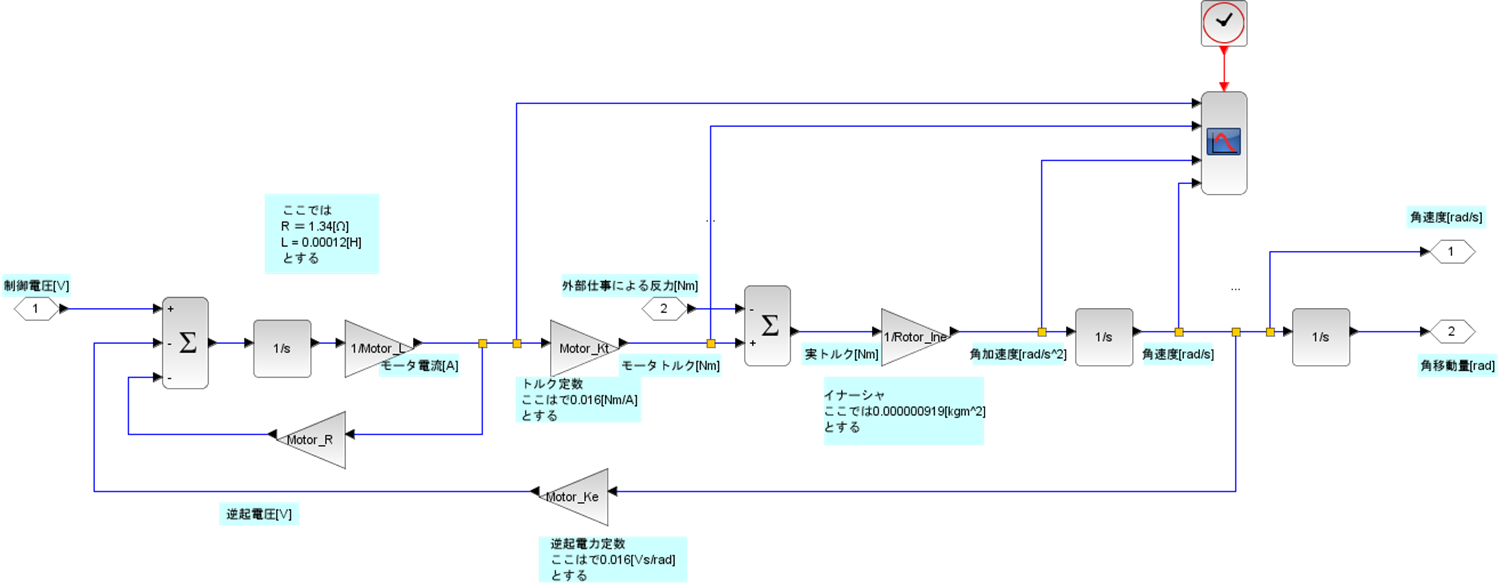
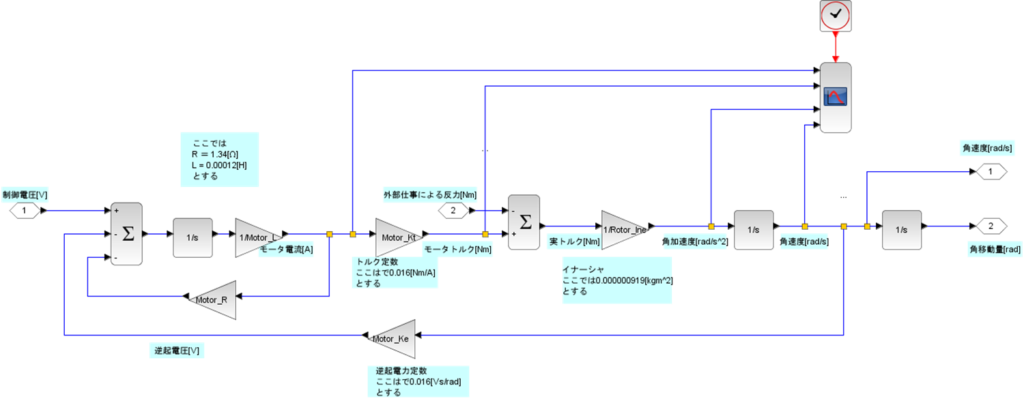
電圧→電流の伝達関数を分解。
\begin{align}
\frac{I_m}{E_m-E_{ke}}&=\frac{1}{L_ms+R_m}\\\\
\frac{E_m-E_{ke}}{I_m}&=L_ms+R_m \\\\
E_m-E_{ke}&=L_m s I_m + R_m I_m \\\\
E_m-E_{ke}-R_m I_m&=L_m s I_m \\\\
I_m&=(E_m-E_{ke}-R_m I_m)\frac{1}{L_m}\frac{1}{s} \\\\
\end{align}
伝達関数分解後のモデル
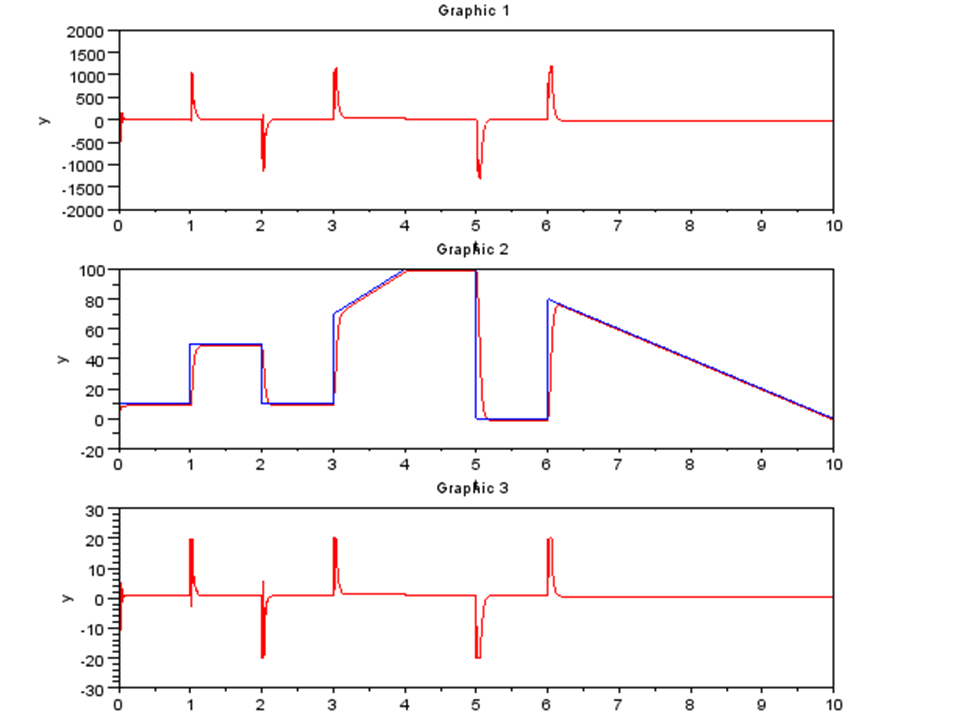
動作波形

コメント