https://www.simulationroom999.com/blog/jdla-deep-learning-for-general-2020-1/
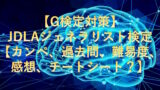
微分
関数\(y=f(x)\)の接線を\(x=a\)に於いて引き、
その傾きを\(y=f(x)\)の\(x=a\)に於ける微分係数と呼び、\(f´(a)\)と表す。
微分係数の定義
$$\lim_{h \to 0} \frac{ f(a+h) – f(x) }{h}$$
\(f´(a)\)の\(a\)を変数\(x\)に置き換えた関数\(f´(x)\)を導関数と呼ぶ。
導関数の公式
$$(x^n)´=nx^{n-1}$$
$$C´=0$$
尚、以下2つは記法が異なるが\(f(x)\)の微分を表現している。
- ラグランジュの記法
- \(f(x)´\)
- ライプニッツの記法
- \(\frac{df(x)}{dx}\)
偏微分
\(f(x,y)\)のような多変数関数に対しては通常の微分(常微分)では演算が困難。
そこで、微分する次元を指定する偏微分が用いられる。
3次元空間として、\(x,y\)の値から\(z\)を求めたい場合は以下の式になる。
$$z=f(x,y)$$
そして、\(x\)の変化が\(z\)の変化を特定したい場合は以下で表現する。
$$\frac{\partial{z}}{\partial{x}}=\frac{\partial{f(x,y)} }{\partial{x}}$$
これを偏導関数と呼ぶ。
ベクトル、行列の演算
ベクトルの和
$${\begin{bmatrix} a_1 \\ a_2 \end{bmatrix}}+ {\begin{bmatrix} b_1 \\ b_2 \end{bmatrix}}= {\begin{bmatrix} a_1 + b_1 \\ a_2 + b_2 \end{bmatrix}} $$
行列の和
$${\begin{bmatrix} a & b \\ c & d \end{bmatrix}}+ {\begin{bmatrix} p & q \\ r & s \end{bmatrix}}= {\begin{bmatrix} a+p & b+q \\ c+r & d+s \end{bmatrix}} $$
行列の積
$${\begin{bmatrix} a & b & c \\ d & e & f \end{bmatrix}}+ {\begin{bmatrix} p & q \\ r & s \\ t & u \end{bmatrix}}= {\begin{bmatrix} ap+br+ct & aq+bs+cu \\ dp+er+ft & dq+es+fu \end{bmatrix}} $$
統計学
統計学は、データからの法則性や知見を数学的に得る分野であり、機械学習もある意味では統計学に含まれると考える。
統計学は以下に大別される。
- 記述統計
- 手元のデータの分析
- 推計統計
- 手元のデータの背景となる母集団の性質を予測する
- ※ 機械学習と密な関係はこちら
相関
以下2種類に大別される。
- 正の相関
- 片方が増えるともう片方も増える
- 負の相関
- 片方が増えるともう片方は減る

コメント