バックナンバーはこちら。
https://www.simulationroom999.com/blog/compare-matlabpythonscilabjulia2-backnumber/
はじめに
正規方程式を導出するまでの説明。
今回は二次形式について。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
ロードマップ【再掲】
まずはロードマップを再掲。
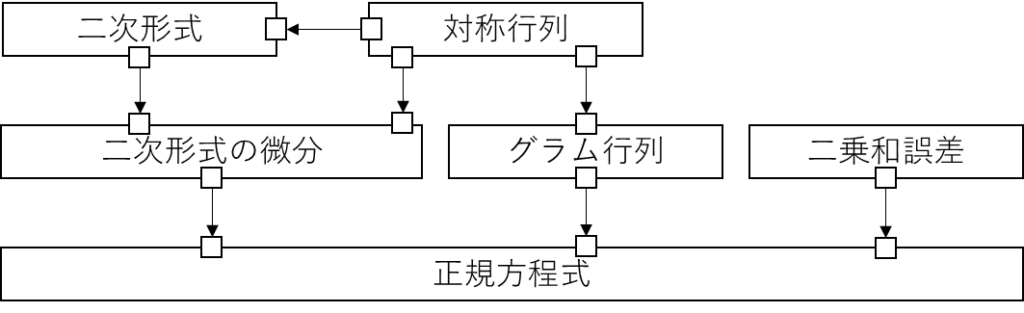
今回は二次形式についてだな。
二次形式
で、二次形式って何?
二次形式とはすべての項の次数が2である多項式のことだな。
そんな一言で僕が理解できるとでも思っているのか・・・。
思ってないよ。
まぁ変数が\(x,y,z\)とあったとして以下な感じだな。
\(
2x^2+y^2+z^2+xy+yz+xz
\)
なるほど。
各変数が自乗含めて2つまで掛ける項だけで構成されてるってことか。
そうそう。
二次形式の一般化
そして、に二次形式を一般化すると以下になる。
\(
\displaystyle \sum_{i,j=1}^n a_{ij}x_i x_j
\)
そして、これをさらにベクトル、行列で表現すると以下になる。
\(
\begin{eqnarray}
\Bigg(
\begin{bmatrix}
a_{11} && a_{12} && \dots && a_{1n} \\
a_{21} && a_{22} && \dots && a_{2n} \\
\vdots && \vdots && \ddots && \vdots \\
a_{n1} && a_{n2} && \dots && a_{nn}
\end{bmatrix}
\begin{bmatrix}
x_1\\
x_2\\
\vdots\\
x_n
\end{bmatrix}
\Bigg)^T
\begin{bmatrix}
x_1\\
x_2\\
\vdots\\
x_n
\end{bmatrix}\\=
\begin{bmatrix}
x_1\\
x_2\\
\vdots\\
x_n
\end{bmatrix}^T
\begin{bmatrix}
a_{11} && a_{12} && \dots && a_{1n} \\
a_{21} && a_{22} && \dots && a_{2n} \\
\vdots && \vdots && \ddots && \vdots \\
a_{n1} && a_{n2} && \dots && a_{nn}
\end{bmatrix}
\begin{bmatrix}
x_1\\
x_2\\
\vdots\\
x_n
\end{bmatrix}
\end{eqnarray}
\)
・・・
最終的には以下で表現できる。
\(
x^TAx
\)
まぁ行列\(A\)に関しては、二次形式の多項式との可逆性を加味すると
対称行列である必要はあるが、これについては後で説明しよう。
こんなん分かるかーーー!!
まぁ二次形式の多項式を行列で表現しただけで、
行列で表現できるといろいろ計算しやすい。
ってのだけ認識できればOKだ。
わかった!
計算しやすい!
覚えた!(覚えただけだ!)
まとめ
まとめだよ。
- 二次形式について確認。
- すべての候の次数が2である多項式。
- 二次形式を一般化して行列表現。
- 行列表現できた方が計算しやすい。
バックナンバーはこちら。

コメント