バックナンバーはこちら。
https://www.simulationroom999.com/blog/compare-matlabpythonscilabjulia-backnumber/

はじめに
前回は、MATLABによるDCモータ状態空間モデルをPID制御のシミュレーションを実施。
問題無く動作確認はできた。
今回は、これのPython(Numpy)版
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
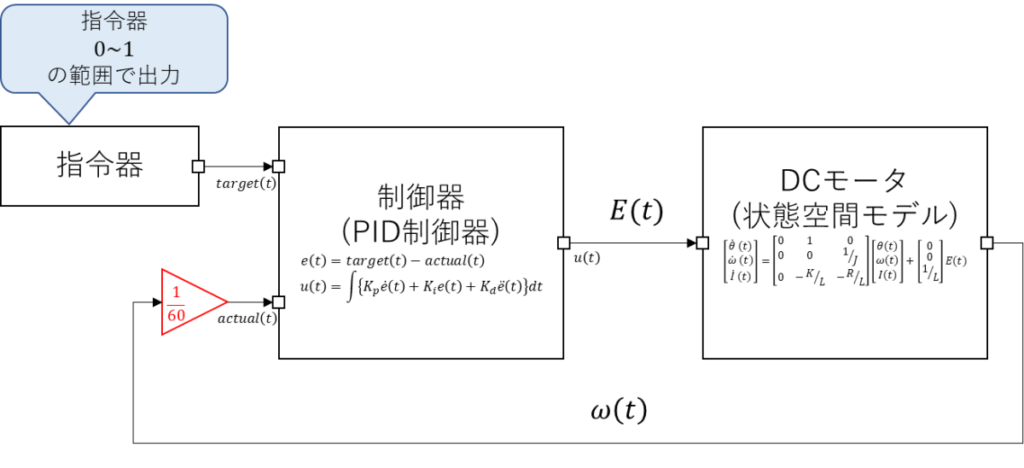
【再掲】PID制御器のブロック線図と全体構成
太郎くん
今回からPython(Numpy)版のシミュレーションだね。
フクさん
前回と同じく、PID制御器のブロック線図と全体構成を再掲しておこう。
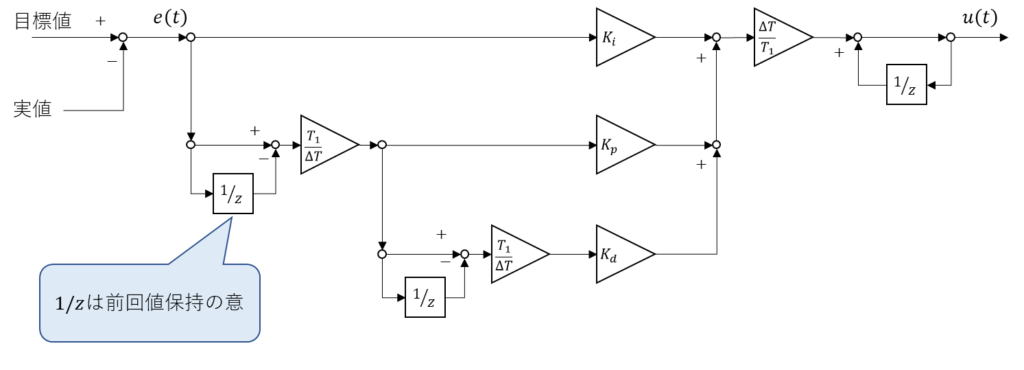
太郎くん
コードだけだと接続で迷子になっちゃうもんね。
Pythonコード
フクさん
そしてPythonコードは以下となる。
import numpy as np
import matplotlib.pyplot as plt
def statespacemodel(A,B,C,D,u,dt,x):
# 状態方程式
x = x + (A@x + B@u) * dt
# 出力方程式
y = C@x + D@u
return x,y
class PID_state:
def __init__(self):
self.pzi = 0 # P項前回値
self.izi = 0 # I項前回値
self.dzi = 0 # D項前回値
def PIDController(state, target, actual, Kp, Ki, Kd, dt, t1):
e_i = target - actual
e_p = (t1/dt)*(e_i - state.pzi)
e_d = (t1/dt)*(e_p - state.dzi)
u = (dt/t1)*(e_p*Kp + e_i*Ki + e_d*Kd) + state.izi
state.pzi = e_i
state.dzi = e_p
state.izi = u
return state, u
def statespacemodel_pid():
K=0.016
J=0.000000919
R=1.34
L=0.00012
A=np.array([[0,1,0],[0,0,K/J],[0,-K/L,-R/L]])
B=np.array([[0],[0],[1/L]])
C=np.array([[1,0,0],[0,1,0],[0,0,1]])
D=np.array([[0],[0],[0]])
dt = 0.0001
t = np.linspace(0, 1, 10000) # 時間(横)軸
u = np.zeros((1,10000)) # 入力信号生成
u[0][5000:10000]=1 # 0.5秒後に0から1へ
y = np.zeros((3,len(t)))
x = np.zeros((3,1))
state = PID_state()
ratio = 1/60
Kp = 0.80
Ki = 0.45
Kd = 0.0
t1 = 0.005
omega = 0
uPID = np.zeros((1,10000))
for i in range(0, len(t)):
state,uPID[0,[i]] = PIDController( state, u[:,[i]], omega*ratio, Kp, Ki, Kd, dt, t1 )
x,y[:,[i]] = statespacemodel(A,B,C,D,uPID[:,[i]],dt,x)
omega = y[[1],[i]]
fig = plt.figure()
ax1 = fig.add_subplot(3, 1, 1)
ax2 = fig.add_subplot(3, 1, 2)
ax3 = fig.add_subplot(3, 1, 3)
ax1.plot(t,uPID.T,'-r', t,u.T, '--b')
ax1.set_xlim(0,1)
ax2.plot(t,y[0:2,:].T)
ax2.set_xlim(0,1)
#ax2.set_ylim(-1,80)
ax3.plot(t,y[2,:].T)
ax3.set_xlim(0,1)
plt.show()
if __name__ == "__main__":
statespacemodel_pid()太郎くん
MATLABの時は構造体使ってたけど、
Pythonの場合はclassを使うのね。
フクさん
classではあるが、構造体的な使い方しかしてない。
Pythonの場合は、事前にclassの構造を明確に定義してあげる必要がある。
太郎くん
まぁ普通はそうだよね。
シミュレーション結果
フクさん
そしてシミュレーション結果は以下となる。
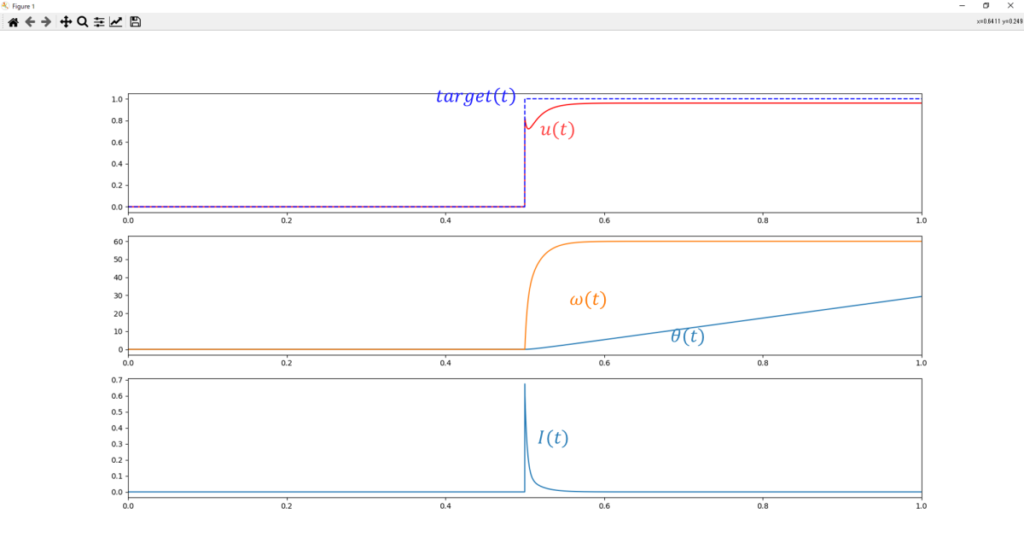
太郎くん
MATLABと同じ結果になったね。
フクさん
というわけでPythonでもOKということだ。
まとめ
フクさん
まとめだよ。
- MATLABでやったDCモータ状態空間モデルをPID制御をPython(Numpy)で実施。
- Pythonの場合、構造体はclassで実現。
- 事前にclassを定義する必要はある。
- MATLABと同様の結果が得られた。
バックナンバーはこちら。

コメント