バックナンバーはこちら。
https://www.simulationroom999.com/blog/compare-matlabpythonscilabjulia-backnumber/

はじめに
前回までで、PID制御の離散化とブロック線図を作成。
これでPID制御器もコード化可能な準備が整った。
というわけで、これをMATLABで実現してみる。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
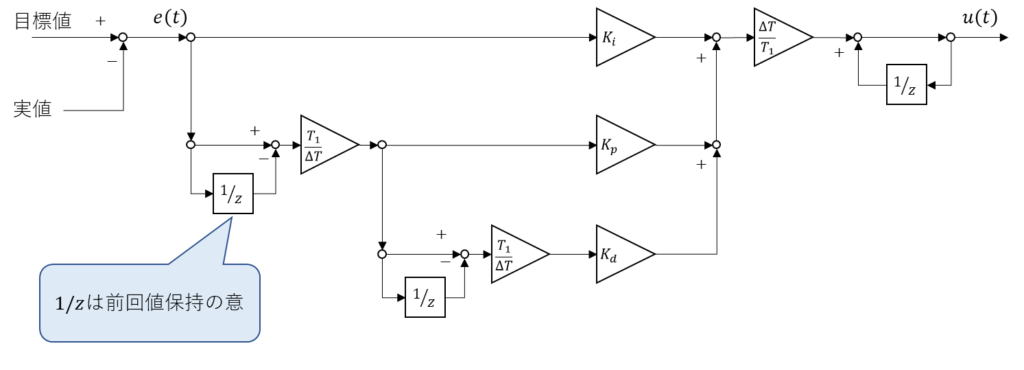
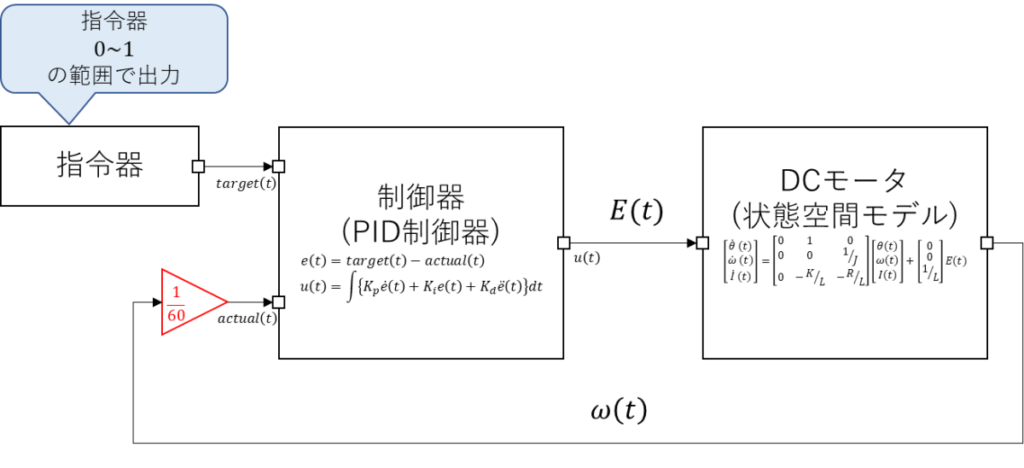
【再掲】PID制御器のブロック線図と全体構成
今回からPID制御のコード化とシミュレーションが始まる感じだね。
そうそう。
まずは、PID制御器のブロック線図と全体構成を再掲しておこう。
MATLABコード
これを元に起こしたMATLABコードが以下になる。
% statespacemodel.m
function [x,y] = statespacemodel(A, B, C, D, u, dt, x)
% 様態方程式
x = x + (A*x + B*u) * dt;
% 出力方程式
y = C*x + D*u;
end% PIDController.m
function [state, u]=PIDController(state, target, actual, Kp, Ki, Kd, dt, t1)
e_i = target - actual;
e_p = (t1/dt)*(e_i - state.pzi);
e_d = (t1/dt)*(e_p - state.dzi);
u = (dt/t1)*(e_p*Kp + e_i*Ki + e_d*Kd) + state.izi;
state.pzi = e_i;
state.dzi = e_p;
state.izi = u;
end% statespacemodel_pid.m
function []=statespacemodel_pid()
K=0.016;
J=0.000000919;
R=1.34;
L=0.00012;
A=[0,1,0 ; 0,0,K/J ; 0,-K/L,-R/L];
B=[0 ; 0; 1/L];
C=[1,0,0;0,1,0;0,0,1];
D=[0;0;0];
dt = 0.0001;
t = linspace(0, 1, 10000); % 時間(横)軸
u = zeros(1,10000); % 入力信号生成
u(1,5000:10000)=1; % 0.5秒後に0から1へ
y = zeros(3,numel(t));
x = zeros(3,1);
state.pzi = 0;state.dzi = 0;state.izi = 0;
ratio = 1/60;
Kp = 0.8;
Ki = 0.45;
Kd = 0.0;
t1 = 0.005;
omega = 0;
uPID = zeros(1,10000);
for i = 1:numel(t)
[state,uPID(1,i)] = PIDController( state, u(:,i), omega*ratio, Kp, Ki, Kd, dt, t1 );
[x,y(:,i)] = statespacemodel(A,B,C,D,uPID(:,i),dt,x);
omega = y(2,i);
end
subplot(3,1,1);
plot(t,uPID','-r', t,u', '--b');
xlim([0,1]);ylim([-0.1,1.1]);
subplot(3,1,2);
plot(t,y(1:2,:));
xlim([0,1]);ylim([-5,65]);
subplot(3,1,3);
plot(t,y(3,:));
xlim([0,1]);ylim([-0.1,1]);
end状態空間モデルとPID制御器とそれを取りまとめるコードの
合計3つのソースコードファイルで実現されてる感じか。
MATLABの場合、1関数1ソースコードの制約があるからね。
関数枚にファイルが分かれてる。
forループの中でPID制御器と状態空間モデルが動いてるね。
信号の繋ぎはローカル変数でやっているのか。
その通り。
ここらへんの構成はソースコードからでは読み取り難いから
最初に出した、全体構成と見比べながら確認すると良いだろう。
ちなみに、PID制御器では前回値を保持する必要あって、
そこはMATLABの構造体の機能を使っている。
あーこの部分だね。
state.pzi = e_i;
state.dzi = e_p;
state.izi = u;特に事前に構造体の定義とかは不要。
ちょっとした時に使うと便利だ。
シミュレーション結果
そしてシミュレーション結果は以下となる。
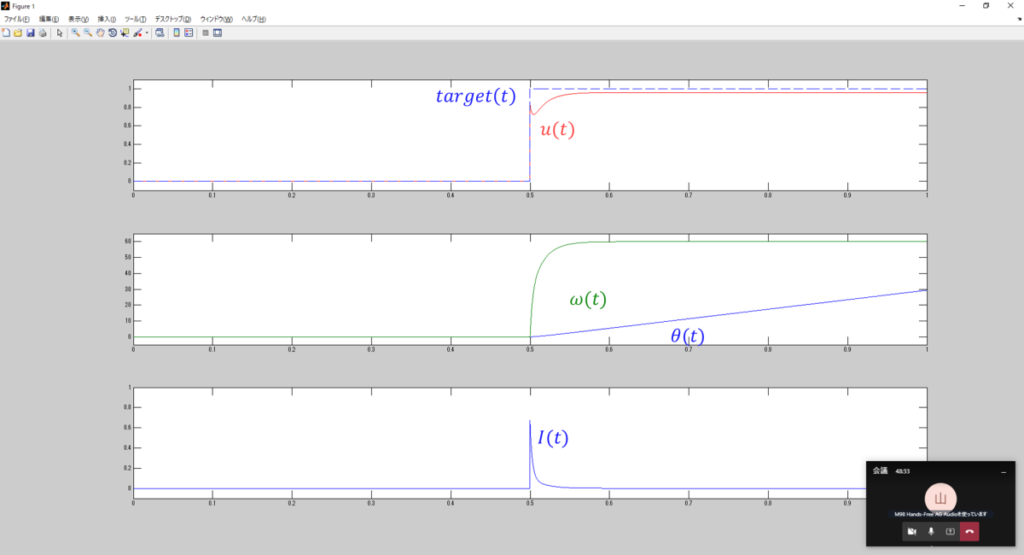
\(u(t)\)を見ると分かるけど、ちゃんとPID制御っぽいことしてるね。
\(u(t)\)の挙動は、PIDの各ゲインを調整すると変わるんで、
試してみると良いだろう。
これで、MATLAB上でのPID制御が確認できたってところだね。
この調子で他のツール、言語も確認していこう。
まとめ
まとめだよ。
- PID制御器のブロック線図と全体構成を再掲。
- 上記をMATLABで実現。
- 接続に関してはコード上では分かり難いので全体構成図と見比べながら確認した方が良い。
- シミュレーション実施。
- u(t)の挙動と見るとPID制御っぽい挙動になっている。
- 各PIDゲインを調整すると挙動が変わるはず。
- u(t)の挙動と見るとPID制御っぽい挙動になっている。
バックナンバーはこちら。

コメント