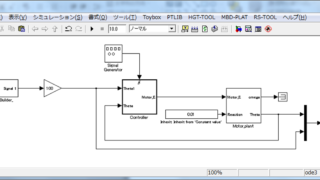
MATLAB/Simulink Matlab/SimulinkによるモーターMILS 前回の「ScilabによるモーターMILS」のMatlab/Simulink版。慣れているということもあるが、やはりMatlab/Simulinkの方が楽。プラントモデル、制御モデル、シミュレーション結果。 2020.03.06 MATLAB/Simulinkモーター
scilab ScilabによるモーターMILS scilab/xcosで以下を実施。モーターの動特性を持ったモータープラントモデルの作成モーターといってもブラシ付きDCモーターモーターの先の負荷は一旦無視。(つまり空転状態)そのモーターを制御する制御モデルの作成さらにそれらを合体させてMILSにする。 2020.03.05 scilabモーター
gdb gdbでSPILS その2 SPILSネタの続きです。前回、SPILSでscilabからgdbに接続する構成を示しましたが、以下の構成の方が一般的です。もう一個別のgdbをgdbサーバーとして起動。scilab直下のgdbからリモートデバッグする体で接続しています。 2020.01.26 gdbscilab
gdb gdbによるISS その2 gdbをISS(インタラクションセットシミュレータ)として利用した上で、制御器の検証に応用する方法。ARM-gdbを使用。Scilabで作成した制御モデル、モータープラントモデルと連携。ELF/DWARFはソースコードファイル名や各ソースライン情報を保持している。 2020.01.22 gdbscilab
scilab scilabとRTOSのCoSimulation 後編 scilabとTOPPERS/JSPの協調シミュレーション。CoSimulationとも呼ばれ、ScilabとRTOS間にCoSimulationインターフェースを設置。それを利用して通信することで異なるシミュレーション間で連携してシミュレーションができる。 2020.01.20 scilab
scilab scilabとRTOSのCoSimulation 前編 scilabとTOPPERS/JSPの協調シミュレーション。RTOSのシミュレーションと連携。上手くつながないと連携が通らないことがある。先に正しいシミュレーション結果を持ち、随時確認しながら実装していく必要がある。 2020.01.19 scilab
scilab scilabとboost:statechartの連携(後編) scilabとboost:statechartの連携 後編です。C言語化ですが、自動化ツールがあるわけでもないので手作業になります。とはいえ、あまりにも設計と離れすぎると結局実装ミスが入り込みそうなので、boost::statechartに一番性質が近いと思われる、イベント拡張型、遷移規定型のハイブリッド 2020.01.17 scilab
scilab scilabとboost:statechartの連携(中編) scilabとboost:statechartの連携 中編です。前回、青図を描きました。理屈上は大丈夫そうなのですが、実際にやってみないと分からんよねってことで、もうちょっと具体的に設計からやってしまいたいと思います。 2020.01.16 scilab
scilab scilabとboost:statechartの連携(前編) ScilabのCBlockの特殊な使用方法の一端。C++Boos:statechartを併用した手法。WindowsいうとLoadlibrary、GetProcAddressUnix系OSであればdlopen、dlsymというAPIを使用すればとりあえずできそう。 2020.01.13 scilab
 MATLAB/Simulink MATLAB/Simulink
MATLAB/Simulink MATLAB/Simulink 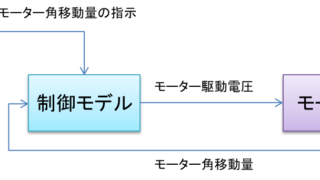 scilab
scilab 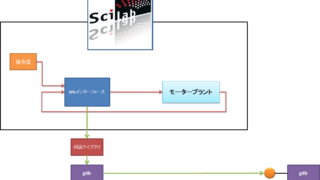 gdb
gdb 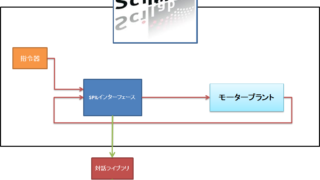 gdb
gdb 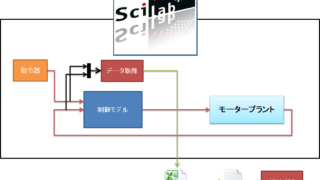 gdb
gdb 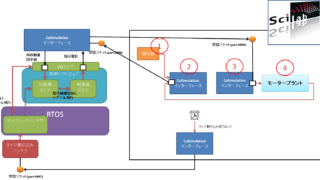 scilab
scilab 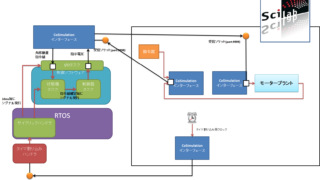 scilab
scilab 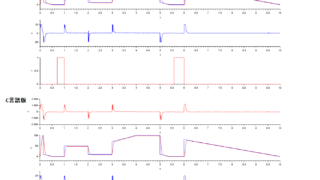 scilab
scilab  scilab
scilab 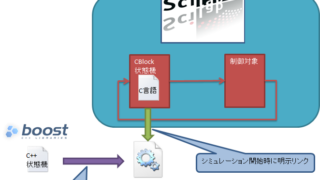 scilab
scilab