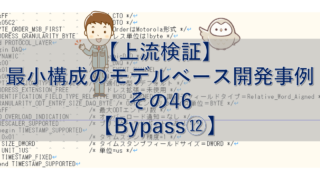
事例 【上流検証】最小構成のモデルベース開発事例 その45【Bypass⑫】 CANapeのXCP関連の設定が終わった段階のA2Lを見てみる。XCP設定だけをもったA2Lを参照。このA2Lがあれば、XCP設定はスキップできる。このA2Lがあれば、CANapeからINCAへ移行も一応できる。100%問題無いとは言い切れないが。 2020.07.12 事例
事例 【上流検証】最小構成のモデルベース開発事例 その45【Bypass⑪】 CANapeへのXCP関連の設定の続き。DAQリストを駆動させるイベントの定義が必要。DAQリストタイプはStaticDAQとDynamicDAQの2種類がある。今回はDynamicDAQ。トランスポート層はEthernetとしての設定。デフォルトではCTRがオフになっているので、オンに切り替える。 2020.07.11 事例
事例 【上流検証】最小構成のモデルベース開発事例 その44【Bypass⑩】 XCPにもversionが存在する。最も基本的な構成はversion1.1。ブロックモードを使うとCMD効率的に動作する。しかし、今回は使わない。シードキーを使うとセキュリティロックが掛けられる。しかし、今回は使わない。MODIFY_BITS、SHORT_DOWNLOAD、SHORT_UPLOAD等はデフォルトでは無効になっている。ECU側が対応しているならば、効率化するために有効化しておいた方が良い。 2020.07.10 事例
事例 【上流検証】最小構成のモデルベース開発事例 その43【Bypass⑨】 CANapeでXCPonEthernetをする場合はデバイスタイプはXCPを選べばOK。設定を進めて行くと、トランスポート層の選択でEthernetが出てくる。A2Lはデータベースファイルという名称で記載されている。A2Lはビルド毎に自動更新させることが可能。ビルド、リプログラミング、計測がシームレスに実施できる。よって、本来であればA2Lを最大活用する方針の方が正しい。 2020.07.09 事例
事例 【上流検証】最小構成のモデルベース開発事例 その42【Bypass⑧】 CANapeでXCPを利用をする上で必要な情報とか。CANoeとCANapeは全く別のツール。A2LファイルがあるとXCP関連の設定を省ける場合がある。通常はA2Lファイルがあるので、XCP関連設定は気にしなくて良いことが多い。プロトタイプの段階ではA2Lが無いことがあるので、無い場合はXCPの仕様を見ながら一つ一つ設定していくことになる。 2020.07.08 事例
事例 【上流検証】最小構成のモデルベース開発事例 その41【Bypass⑦】 今回から実際に使うツールの話になる。Bypassを実現するにはMCツールが必要。MがMeasurementで計測。CがCalibrationでキャリブレーション。MCツールの代表格にETAS社製INCAとVector製CANapeがある。どちらが良いということは無く、使用実績から選択した方が良い。 2020.07.06 事例
事例 【上流検証】最小構成のモデルベース開発事例 その40【Bypass⑥】 今回はASAM XCPのDTOパケットのDAQ,STIMについての話。DAQ、STIMは事前にアドレス、サイズの情報をツール、ECUの間で共有する。DAQはECU内の制御周期直後のタイミングで送出されるため常に更新後の最新値を効率的に得られる。STIMの送出自体はイベントと同期している必要はないが、実際に更新されるのは制御周期の直前。 2020.07.05 事例
事例 【上流検証】最小構成のモデルベース開発事例 その39【Bypass⑤】 今回はASAM XCPのCTOパケットのCMDについての話。CMDだけでメモリの読み書きはできる。その場合、MTAという概念が重要になる。メモリダンプに向いたUPLOAD、DOWNLOAD。リアルタイムモニタに向いたSHORT_UPLOAD、SHORT_DOWNLOAD。 2020.07.04 事例
事例 【上流検証】最小構成のモデルベース開発事例 その38【Bypass④】 今回はASAM XCPのDTOパケットの話。DTOパケットのパターンは4パターン。TimeStampフィールドのパターンも4パターン。使用する物理層で使用できるデータ領域に依存しておおよそ2パターンに集約される。最小構成版と最大構成版の2パターン。しかし、CAN-FDの台頭に伴い、中間のパターンが乱立する可能性あり。 2020.07.03 事例
事例 【上流検証】最小構成のモデルベース開発事例 その37【Bypass③】 今回はASAM XCPのフレーム構成やパケット構成の話。XCPonEthernetはヘッダ、パケット、テイルの三つ組み構成。CTOパケットはPIDとDATAだけの構成。CTOパケットはCMD、RES、ERR、EV、SERVの5種類。基本的にはCMD、RES、ERRだけ知っておけば良い。 2020.07.02 事例
 事例 事例
事例 事例 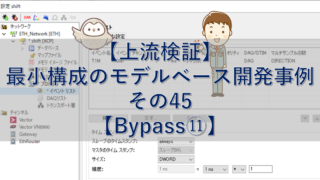 事例
事例 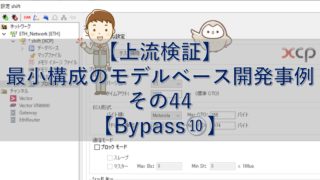 事例
事例 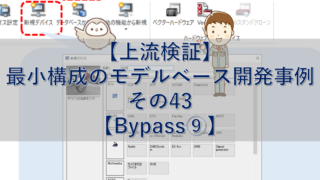 事例
事例  事例
事例  事例
事例  事例
事例  事例
事例 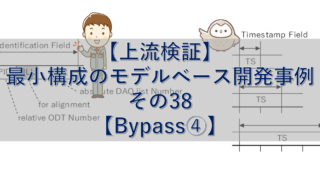 事例
事例 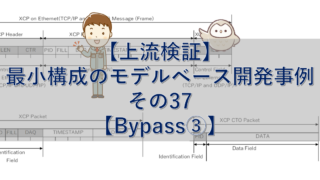 事例
事例