事例 【上流検証】最小構成のモデルベース開発事例 その41【Bypass⑦】 今回から実際に使うツールの話になる。Bypassを実現するにはMCツールが必要。MがMeasurementで計測。CがCalibrationでキャリブレーション。MCツールの代表格にETAS社製INCAとVector製CANapeがある。どちらが良いということは無く、使用実績から選択した方が良い。 2020.07.06 事例
事例 【上流検証】最小構成のモデルベース開発事例 その40【Bypass⑥】 今回はASAM XCPのDTOパケットのDAQ,STIMについての話。DAQ、STIMは事前にアドレス、サイズの情報をツール、ECUの間で共有する。DAQはECU内の制御周期直後のタイミングで送出されるため常に更新後の最新値を効率的に得られる。STIMの送出自体はイベントと同期している必要はないが、実際に更新されるのは制御周期の直前。 2020.07.05 事例
事例 【上流検証】最小構成のモデルベース開発事例 その39【Bypass⑤】 今回はASAM XCPのCTOパケットのCMDについての話。CMDだけでメモリの読み書きはできる。その場合、MTAという概念が重要になる。メモリダンプに向いたUPLOAD、DOWNLOAD。リアルタイムモニタに向いたSHORT_UPLOAD、SHORT_DOWNLOAD。 2020.07.04 事例
事例 【上流検証】最小構成のモデルベース開発事例 その38【Bypass④】 今回はASAM XCPのDTOパケットの話。DTOパケットのパターンは4パターン。TimeStampフィールドのパターンも4パターン。使用する物理層で使用できるデータ領域に依存しておおよそ2パターンに集約される。最小構成版と最大構成版の2パターン。しかし、CAN-FDの台頭に伴い、中間のパターンが乱立する可能性あり。 2020.07.03 事例
事例 【上流検証】最小構成のモデルベース開発事例 その37【Bypass③】 今回はASAM XCPのフレーム構成やパケット構成の話。XCPonEthernetはヘッダ、パケット、テイルの三つ組み構成。CTOパケットはPIDとDATAだけの構成。CTOパケットはCMD、RES、ERR、EV、SERVの5種類。基本的にはCMD、RES、ERRだけ知っておけば良い。 2020.07.02 事例
事例 【上流検証】最小構成のモデルベース開発事例 その36【Bypass②】 今回はもう少し具体的な実現手段について。Bypassの標準的実現手段としてASAM XCPがある。XCPの物理層はCAN/CAN-FD/Ethernetなど多岐に渡る。Bypassを効率的に実現するにはSTIM、DAQの知識があった方が良い。Bypass対応ツールもXCPの知識が前提となる設定項目が多い。 2020.07.01 事例
事例 【上流検証】最小構成のモデルベース開発事例 その35【Bypass①】 今回からBypassという手法の話に突入。まずはいつもの太郎くんの災難からスタート。Bypassという実験手法がある。使用する回線は特に決められていないが、EthernetやCANであることが多い。アルゴリズムが確定しておらず、試行回数を増やす場合にとても有効な手法。 2020.06.30 事例
事例 【上流検証】最小構成のモデルベース開発事例 その34【ネットワークRAPID⑦】 いろいろ準備は整ったので今回は動かす!CAPLもブレークポイント、ステップ実行などのデバッグ機能は保有している。ただし、シミュレーションバスの時だけ可能。送信周期はプロットで見るか、CAN回線モニタで確認できる。 2020.06.29 事例
事例 【上流検証】最小構成のモデルベース開発事例 その33【ネットワークRAPID⑥】 今回は、CAPLを使用したシステム変数のシグナルへの分配を行う。CAPLはValueObjectというイベントハンドラを起点に処理を走らせる。シグナル更新とCAN送信は別物。シグナルの更新有無に関係なく送信周期を定義できる。 2020.06.28 事例
事例 【上流検証】最小構成のモデルベース開発事例 その32【ネットワークRAPID⑤】 今回は、システム変数の定義と出力の仕方の話になる。SimulinkモデルからCANoeのシステム変数に出力する場合はSystemVriableOutputブロックを使用する。CANoeでシステム変数を定義できる。システム変数の型は、扱うシグナルに近いものを選択しておいた方が良い。 2020.06.27 事例
 事例 事例
事例 事例  事例
事例  事例
事例  事例
事例 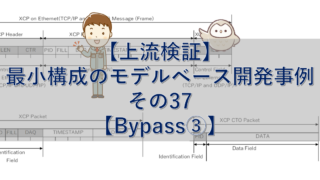 事例
事例 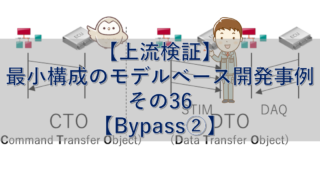 事例
事例 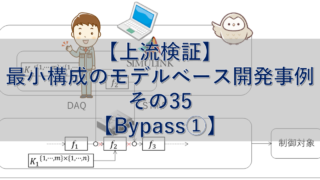 事例
事例 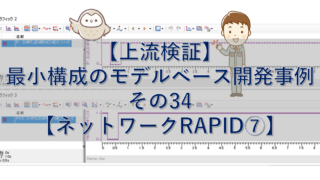 事例
事例  事例
事例  事例
事例