事例 【上流検証】最小構成のモデルベース開発事例 その50【Bypass⑯】 やっとBypass実施。いままでの内容を振り返った。一連の流れを大きく把握していれば、ツールが変っても適応できる。 2020.07.16 事例
事例 【上流検証】最小構成のモデルベース開発事例 その49【Bypass⑮】 CANapeでは計測対象の変数以外にCANape内でのみ読み書き可能なグローバル変数が定義できる。関数エディタから追加編集可能。SimulinkにCANapeIOブロックを繋ぐことでCANapeと連携可能なDLLが作成可能。CANoeと異なり、CANapeIOの変数名はCANapeと合わせる必要はない。しかし、合わせておいた方が楽ではある。グローバル変数をモニタすることが可能。SimulinkDLLの動作確認だけであれば、グローバル変数で見た方が問題が起きた際の実機との切り分けがし易い。 2020.07.15 事例
事例 【上流検証】最小構成のモデルベース開発事例 その48【Bypass⑭】 A2Lで変数定義ができれば、CANape上の計測対象設定は比較的簡単。DAQ計測をする場合は計測設定でCyclicを指定しておく必要がある。パラメータWindowに登録した変数は書き換えが可能。STIMに対応していればSTIMで、対応してなければDOWNLOAD、SHORT_DOWNLOADで書き換えとなる。 2020.07.14 事例
事例 【上流検証】最小構成のモデルベース開発事例 その47【Bypass⑬】 ASAP2 Studioを使った読み書き可能変数定義をやる。ASAP2 Studioで読み書き用の変数定義ができる。本来はmapファイルから設定する。A2Lの中には使用されていないパラメータも存在する。ResolutionとAccuracy。 2020.07.13 事例
事例 【上流検証】最小構成のモデルベース開発事例 その45【Bypass⑫】 CANapeのXCP関連の設定が終わった段階のA2Lを見てみる。XCP設定だけをもったA2Lを参照。このA2Lがあれば、XCP設定はスキップできる。このA2Lがあれば、CANapeからINCAへ移行も一応できる。100%問題無いとは言い切れないが。 2020.07.12 事例
事例 【上流検証】最小構成のモデルベース開発事例 その45【Bypass⑪】 CANapeへのXCP関連の設定の続き。DAQリストを駆動させるイベントの定義が必要。DAQリストタイプはStaticDAQとDynamicDAQの2種類がある。今回はDynamicDAQ。トランスポート層はEthernetとしての設定。デフォルトではCTRがオフになっているので、オンに切り替える。 2020.07.11 事例
事例 【上流検証】最小構成のモデルベース開発事例 その44【Bypass⑩】 XCPにもversionが存在する。最も基本的な構成はversion1.1。ブロックモードを使うとCMD効率的に動作する。しかし、今回は使わない。シードキーを使うとセキュリティロックが掛けられる。しかし、今回は使わない。MODIFY_BITS、SHORT_DOWNLOAD、SHORT_UPLOAD等はデフォルトでは無効になっている。ECU側が対応しているならば、効率化するために有効化しておいた方が良い。 2020.07.10 事例
事例 【上流検証】最小構成のモデルベース開発事例 その43【Bypass⑨】 CANapeでXCPonEthernetをする場合はデバイスタイプはXCPを選べばOK。設定を進めて行くと、トランスポート層の選択でEthernetが出てくる。A2Lはデータベースファイルという名称で記載されている。A2Lはビルド毎に自動更新させることが可能。ビルド、リプログラミング、計測がシームレスに実施できる。よって、本来であればA2Lを最大活用する方針の方が正しい。 2020.07.09 事例
事例 【上流検証】最小構成のモデルベース開発事例 その42【Bypass⑧】 CANapeでXCPを利用をする上で必要な情報とか。CANoeとCANapeは全く別のツール。A2LファイルがあるとXCP関連の設定を省ける場合がある。通常はA2Lファイルがあるので、XCP関連設定は気にしなくて良いことが多い。プロトタイプの段階ではA2Lが無いことがあるので、無い場合はXCPの仕様を見ながら一つ一つ設定していくことになる。 2020.07.08 事例
付加価値 【理想】「自動車開発×ソフトウェア」について書いてみた【現実】 自動車業界のソフトウェアエンジニアのプログラミングスキルは決して高い方ではない。品質重視の開発プロセスであるため、自然とそうなっている。決してエンジニアがサボってるわけでは無い。特殊な用語が多数出てくるが、頑張って慣れるしかない。この業界に10年以上いても意味不明な用語は1週間に2、3回程度の頻度で出てくる。しかもググっても出てこない。プログラミング言語知識も重要ではあるが、それ以上に物理/数学の知識の方の付加価値が圧倒的に大きい。物理/数学の話をプログラミングへ落とし込めると最強。 2020.07.07 付加価値
 事例 事例
事例 事例  事例
事例  事例
事例  事例
事例  事例
事例 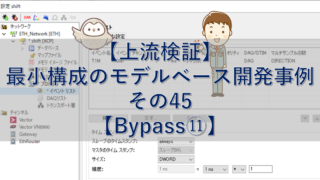 事例
事例 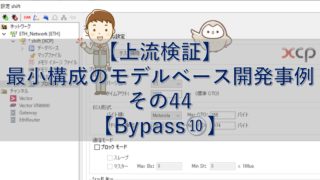 事例
事例 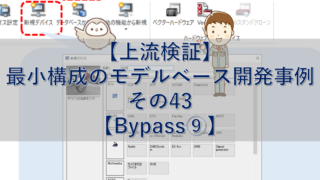 事例
事例  事例
事例  付加価値
付加価値