
バックナンバーはこちら。
https://www.simulationroom999.com/blog/model-based-of-minimum-2-backnumber/

はじめに
前回はAUTOSAR-XCPの機能範囲について確認した。
純粋にXCPを実現しているBSWだけなので、下位BSWのCanIfが必要。
CanIfについては以前、診断通信BSWの一つであるCanTpの実験をしたものを使いまわせそう。
ある程度、実現の目途が立ったところで実現までのロードマップを考える。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
AUTOSAR-XCP PCシミュレーションに向けてのロードマップ
とりあえず、技術的課題は解消された感があるから、
あとはどう進めていくかだねー。
そうだね。
以下の方針で進めていこうと思う。
- 実験構成を決める
- AUTOSAR-XCPのPCシミュレーション環境
- CanIfの実装
- AUTOSAR-XCPのコンフィグレーション
- PyXCPで一連のコマンド実験
- PyXCPでSTIM実験
お!PyXCPは使うんだね。
うん。
こういったXCP関連の実験としては持ってこいのライブラリだしねー。
実験構成
まずは実験構成だね。
以下の構成を想定している。
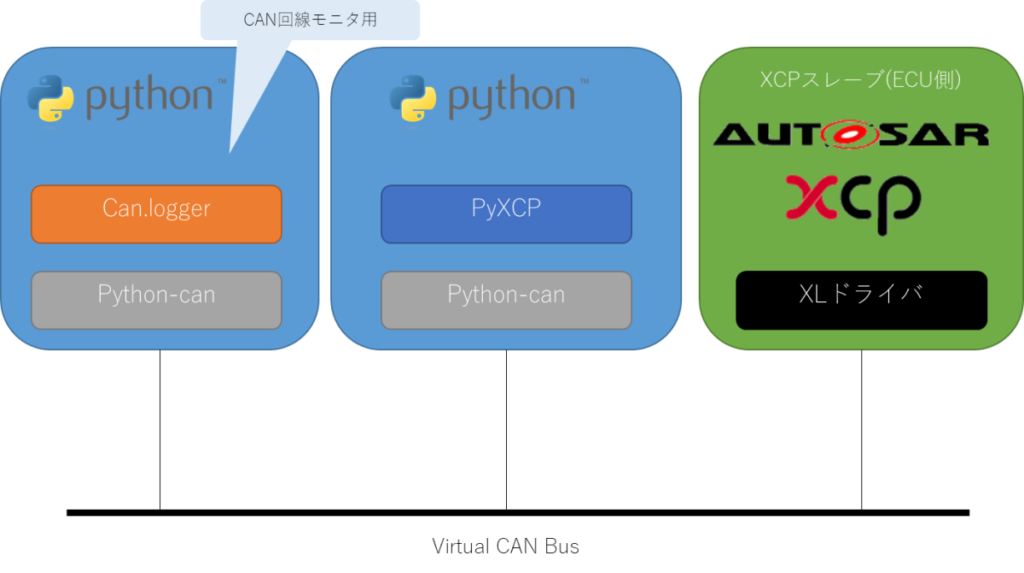
恒例のVirtual CAN Busを使うパターンだね。
あと、Virtual CAN Busを使うためにXLドライバをAUTOSAR-XCPの下に入れ込む感じか。
そうそう。
以前やった診断通信のDcm、CanTpの時とほぼ一緒の構成になってるはずだ。
AUTOSAR-XCPのPCシミュレーション環境
次はシミュレーション環境だが、
これもいつも通りVisual Studio 2017 expressを使用する。

ここら辺はもう慣れたもんだって感じだ。
以前、言ったようにPCシミュレーションを想定した作りというわけでもないし、
XCP以外のAUTOSARならではのソースファイルがいくつか必要になるはずだ。
まずはここら辺を整理していった方がよいだろう。
とりあえず、全部含めてビルドじゃだめそうって感じ?
そうだね。
不足しているヘッダファイルとか結構ありそうなんで、
CanTp実験コードから不足分を移植することになると思う。
まぁ移植できるものがあるんだったらなんとかなるか。
次回から、ここらへんの辻褄合わせをやっていこう。
まとめ
まとめだよ。
- AUTOSAR-XCP PCシミュレーションに向けてのロードマップを提示。
- 恒例の実験構成、環境、実験内容を提示。
- 実験構成の提示。
- こちらもおなじみのVirtual CAN Busを使用した構成。
- AUTOSAR-XCPのPCシミュレーション環境も恒例のVisual Studio 2017 express。
バックナンバーはこちら。


コメント