https://www.simulationroom999.com/blog/derivation-of-motor-transfer-function/
ここまで出てきた伝達関数をまとめる。
電圧からトルクまで
$$\frac{T_r}{E_m-K_eω}=\frac{K_t}{L_ms+R_m}$$
トルクから角速度まで
$$\frac{ω}{T_r-T_l}=\frac{1}{J}\frac{1}{s}$$
角速度から角移動量
$$\frac{θ}{ω}=\frac{1}{s}$$
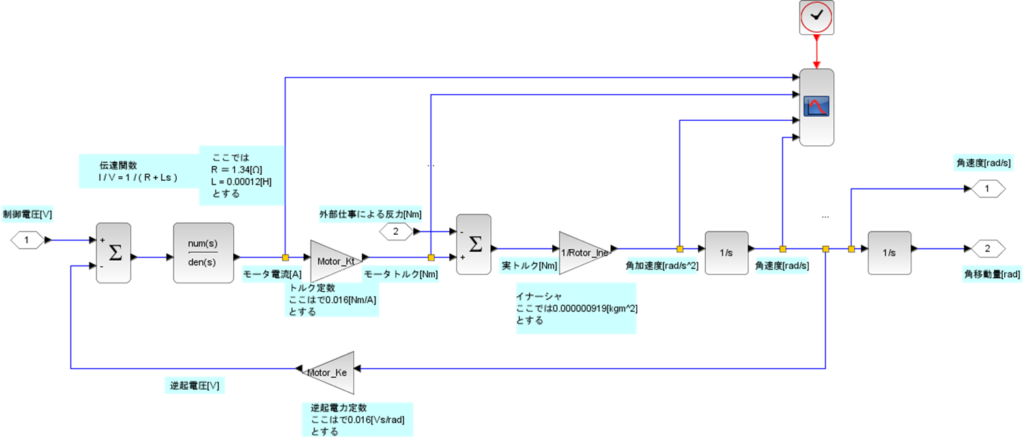
モデル
前項の伝達関数をブロック線図ですべて繋いで表現すると以下になる。
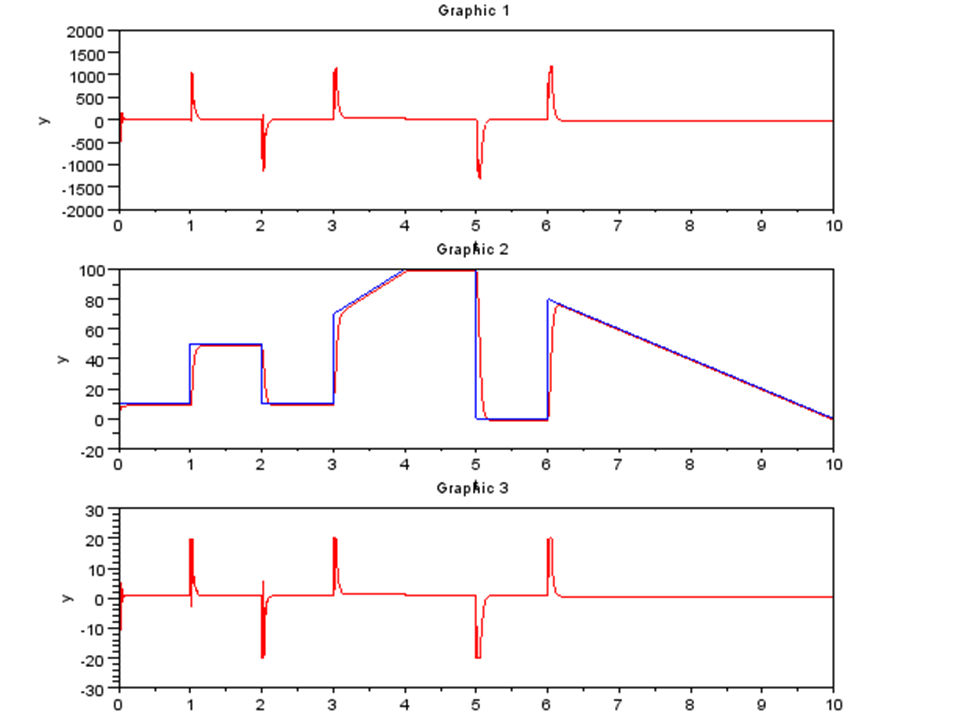
動作波形

コメント