![[DoCAN] Vehicle Diagnostic Communication Part 46 [UDS 7]](https://www.simulationroom999.com/blog/wp-content/uploads/2022/12/01_eyecatch-8.png)
Click here for back issues.
https://www.simulationroom999.com/blog/diagnostic-communication-en-back-issue/

Introduction.
Explanation of ISO 14229, the UDS.
In this article, the overall structure of the UDS simulation will be explained.
Overall structure of the UDS simulation
First, a presentation of the overall structure of the simulation!
A rough figure is shown below.
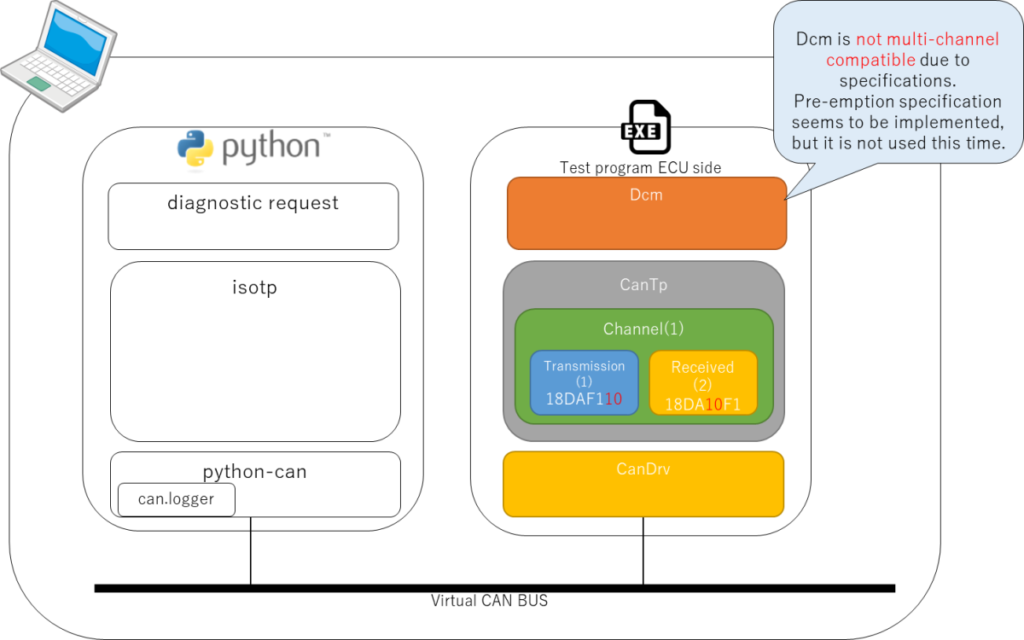
For your information, CanTp uses CanTp from A-COMSTACK.
And for Dcm, use OpenSAR’s Dcm.
It looks like a very thorny path, but as long as you know the interface well, you should be fine. (It should be fine.)
UDS simulation configuration issues
It is true to say that this configuration is problematic.
(Not to say that it is an impossible configuration…)
A-COMSTACK’s CanTp is AUTOSAR r4.x series.
OpenSAR’s Dcm is AUTOSAR r3.x series.
In other words, the revisions of the specifications are different.
So, in a sense, it is like illegal building.
(It still looks like a thorny path, doesn’t it?)
I have checked the specifications of each system in advance and confirmed that there is no problem with the connection.
So it will probably be OK. (Probably.)
I’ll take care of the actual connection for now, so you can all learn about the configuration and behavior of AUTOSAR-Dcm, if only approximately!
I will explain the details of each service in the next article.
Conclusion
- Presentation of the overall structure of the USD simulation.
- A-COMSTACK is AUTOSAR r3.x series and OpenSAR is AUTOSAR r4.x series.
- Therefore, illegal construction.
Click here for back issues.


コメント