![[CanTp] Vehicle Diagnostic Communication Part 30 [Simulation 18]](https://www.simulationroom999.com/blog/wp-content/uploads/2022/11/01_eyecatch-25.png)
Click here for back issues.
https://www.simulationroom999.com/blog/diagnostic-communication-en-back-issue/

Introduction.
Let’s simulate ISO-TP. series.
In this issue, I will explain A-COMSTACK.
What is A-COMSTACK?
It’s time to start explaining AUTOSAR-CanTp.
The problem here is which CanTp to use.
It is best to use open source AUTOSAR, but what should we use?
Here, we will use A-COMSTACK from the TOPPERS Association.
TOPPERS/A-COMSTACK

Source code is here.

This TOPPERS/A-COMSTACK has a caveat.
Although it is open source, there are no rights to use it as is.
Strictly speaking, there is a restriction: “To use it commercially, you must be an AUTOSAR partner.”
This is also true for other open source AUTOSARs.
However, since this is not a commercial use but just for learning, it is not necessary to worry about it at first.
Operating Environment
The assumed operating environment for TOPPERS/A-COMSTACK is on a microcontroller such as RH850FL.
This time, we are planning to run it on a PC, but will that be a problem?
To be honest, I don’t know.
But I think there is no problem because it should be written in C language.
Structure of A-COMSTACK
Let’s check the structure of A-COMSTACK.
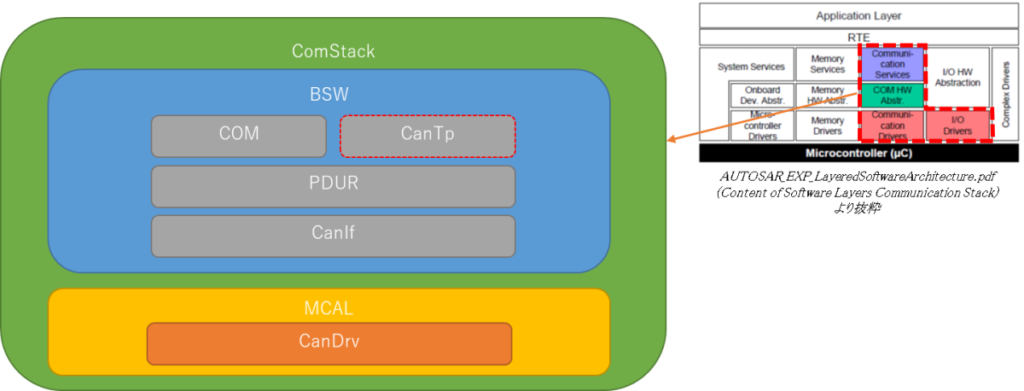
And it will be the CanTp section that we want to use this time.
The question arises, “Why not use PDUR or CanIf, which are located at the lower level?”
If we follow the AUTOSAR style, it is correct to include them and adjust the balance.
However, in this case, I do not want to use AUTOSAR, I just want a function to realize diagnostic communication.
Therefore, I’m going to use CanTp only by forcibly pulling it out because it is troublesome.
(Ah, “troublesome” is the real word…)
How to check operation
How to check the operation?
Do we let CanTp communicate with CanTp like we did with can-isotp?
No, no, it is OK if can-isotp is on the tester side.
Since can-isotp itself has been confirmed to work in accordance with ISO 15765-2, it is OK to use it.
We will start touching A-COMSTACK in earnest next time.
Conclusion
- A-COMSTACK, a set of communication stack BSW for AUTOSAR, is released by the TOPPERS Association.
- CanTp is used in this stack.
- A-COMSTACK can only be used commercially if you are an AUTOSAR partner.
- This time, it is used for learning purpose.
- The off-board tester side for operation check uses python can-isotp.
Click here for back issues.


コメント