バックナンバーはこちら。
https://www.simulationroom999.com/blog/compare-matlabpythonscilabjulia-backnumber/

はじめに
前回は、Python(Numpy)によるDCモータ状態空間モデルをPID制御のシミュレーションを実施。
MATLABと同様の結果は取得でき、問題無く動作確認はできた。
今回は、これのScilab版
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
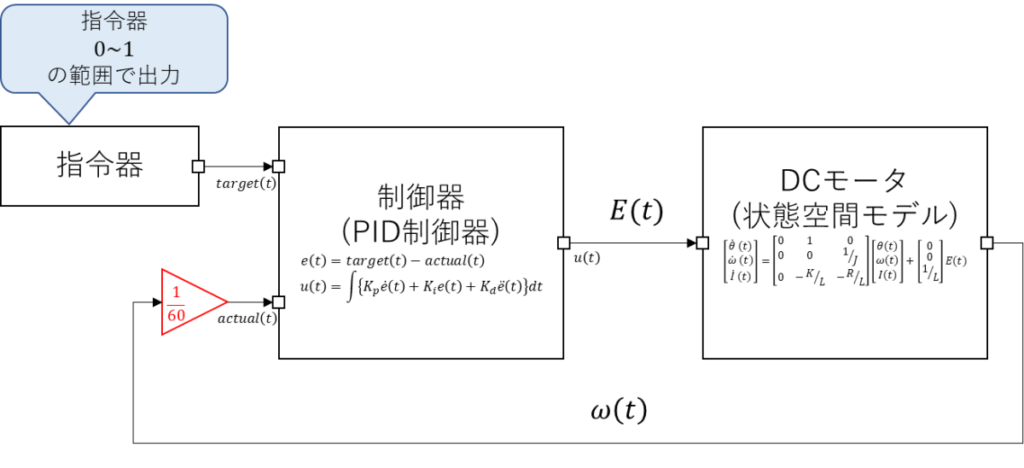
【再掲】PID制御器のブロック線図と全体構成
今回はScilab版のシミュレーションだね。
おなじみのPID制御器のブロック線図と全体構成の再掲。
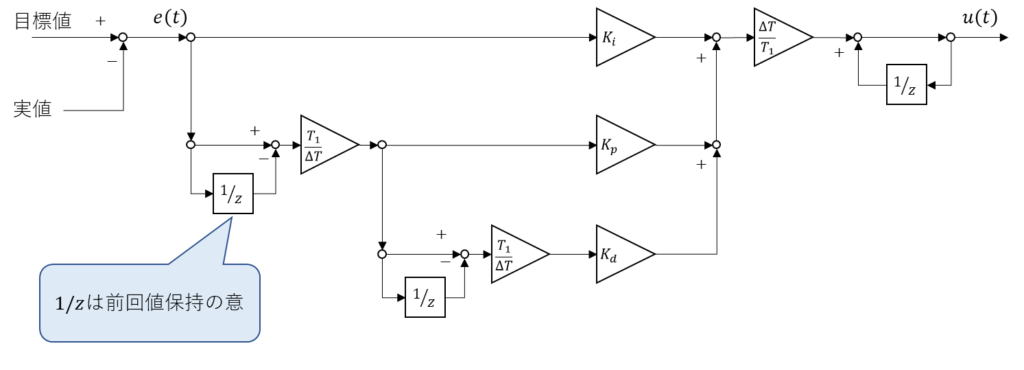
ScilabはだいたいMATLABと一緒っぽいからあんまり心配はないかな。
Scilabコード
というわけでScilabコードが以下になる。
function [x,y] = statespacemodel(A,B,C,D,u,dt,x)
// 状態方程式
x = x + (A*x + B*u) * dt;
// 出力方程式
y = C*x + D*u;
endfunction
function [state, u]=PIDController(state, target, actual, Kp, Ki, Kd, dt, t1)
e_i = target - actual;
e_p = (t1/dt)*(e_i - state.pzi);
e_d = (t1/dt)*(e_p - state.dzi);
u = (dt/t1)*(e_p*Kp + e_i*Ki + e_d*Kd) + state.izi;
state.pzi = e_i;
state.dzi = e_p;
state.izi = u;
endfunction
function [] = statespacemodel_pid()
K=0.016;
J=0.000000919;
R=1.34;
L=0.00012;
A=[0,1,0 ; 0,0,K/J ; 0,-K/L,-R/L];
B=[0 ; 0; 1/L];
C=[1,0,0;0,1,0;0,0,1];
D=[0;0;0];
dt = 0.0001;
t = linspace(0, 1, 10000); // 時間(横)軸
u = zeros(1,10000); // 入力信号生成
u(1,5000:10000)=1; // 5秒後に0から1へ
y = zeros(3,length(t));
x = zeros(3,1);
state.pzi = 0;state.dzi = 0;state.izi = 0;
ratio = 1/60;
Kp = 0.80;
Ki = 0.45;
Kd = 0.0;
t1 = 0.005;
omega = 0;
uPID = zeros(1,10000);
for i = 1:length(t)
[state,uPID(1,i)] = PIDController( state, u(:,i), omega*ratio, Kp, Ki, Kd, dt, t1 );
[x,y(:,i)] = statespacemodel(A,B,C,D,uPID(:,i),dt,x);
omega = y(2,i);
end
subplot(3,1,1);
plot(t,uPID,'-r', t, u, '--b');
p=gca();
p.tight_limits(:)="on";p.data_bounds(:,2)=[-0.1;1.1];p.data_bounds(:,1)=[0;1];
subplot(3,1,2);
plot(t',y(1:2,:)');
p=gca();
p.tight_limits(:)="on";p.data_bounds(:,2)=[-5;65];p.data_bounds(:,1)=[0;1];
subplot(3,1,3);
plot(t,y(3,:));
p=gca();p.tight_limits(:)="on";p.data_bounds(:,2)=[-0.1;1];p.data_bounds(:,1)=[0;1];
endfunction予想通りMATLABと一緒か。
構造体も同じ書き方ができるんだね。
構造体については書き方は一緒だが、
概念は大きく異なるようだな。
Scilabの構造体は連想配列として実装されているようだ。
連想配列?
なんだっけ?
連想配列(れんそうはいれつ、英語: associative array)とは、コンピュータプログラミングにおいて、添え字にスカラー数値以外のデータ型(文字列型等)も使用できる配列である。抽象データ型のひとつ。連想リスト、連想コンテナ、辞書(あるいはカタカナでディクショナリ 英語: dictionary)、ハッシュ(英語: hash)、マップ(英語: map)とも呼ばれる。
Wikipediaより(https://ja.wikipedia.org/wiki/%E9%80%A3%E6%83%B3%E9%85%8D%E5%88%97)
具体的にはこんな書き方だな。
添え字が文字列になる感じ。
state('pzi')=1あ、こんな書き方はみたことあるな。
配列っぽいんだけど、なんかなんでも入れられちゃう感じ。
Scilabで以下にようにすると、連想配列である事実はわかるな。
-->state.pzi = 1;
-->state.dzi = 2;
-->state.izi = 3;
-->state('pzi')
ans =
1.
-->state('dzi')
ans =
2.
-->state('izi')
ans =
3. なるほど。
確かに連想配列だ。
シミュレーション結果
そしてシミュレーション結果。
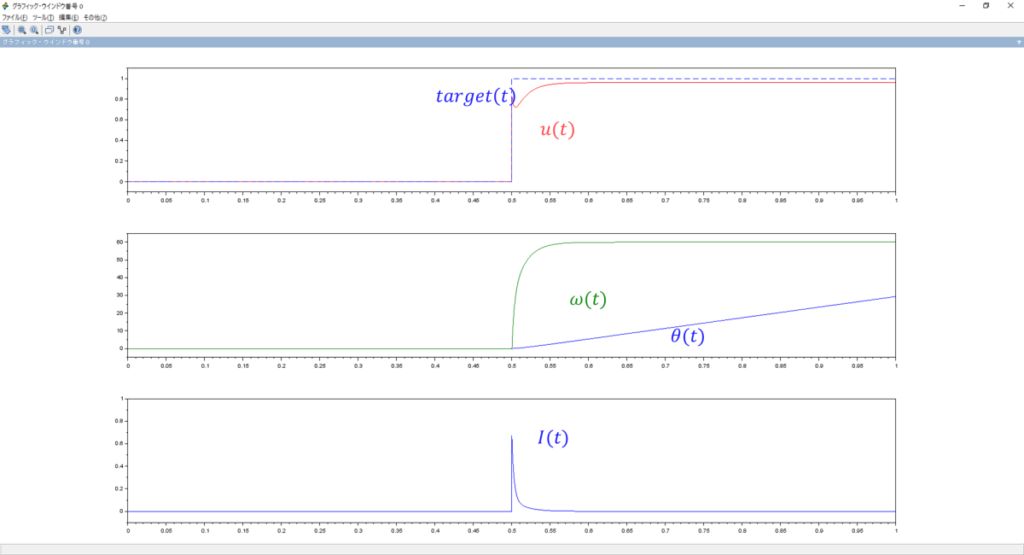
これも同じ結果だね。
というわけでScilabもOK。
まとめ
まとめだよ。
- ScilabでDCモータ状態空間モデルをPID制御シミュレーション実施。
- コード自体はMATLABと一緒。
- 構造体の生成の仕方も一緒だが、内部的には連想配列で実現されている。
- シミュレーション結果もOK。
バックナンバーはこちら。


コメント