バックナンバーはこちら。
https://www.simulationroom999.com/blog/compare-matlabpythonscilabjulia-backnumber/

はじめに
前回から、運動方程式を元に、
- ブロック図を作成
- 上記ブロック図の離散化
- 上記を元に漸化式導出
漸化式まで出てるとCコード化が可能になる。
このCコードを今回確認する。
登場人物
博識フクロウのフクさん

イラストACにて公開の「kino_k」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=iKciwKA9&area=1
エンジニア歴8年の太郎くん

イラストACにて公開の「しのみ」さんのイラストを使用しています。
https://www.ac-illust.com/main/profile.php?id=uCKphAW2&area=1
【再掲】ブロック図&漸化式
今回は運動方程式のCコードを見せてくれるんだっけ?
そうだね。
まずは各ブロック図、漸化式を再掲しておこう。
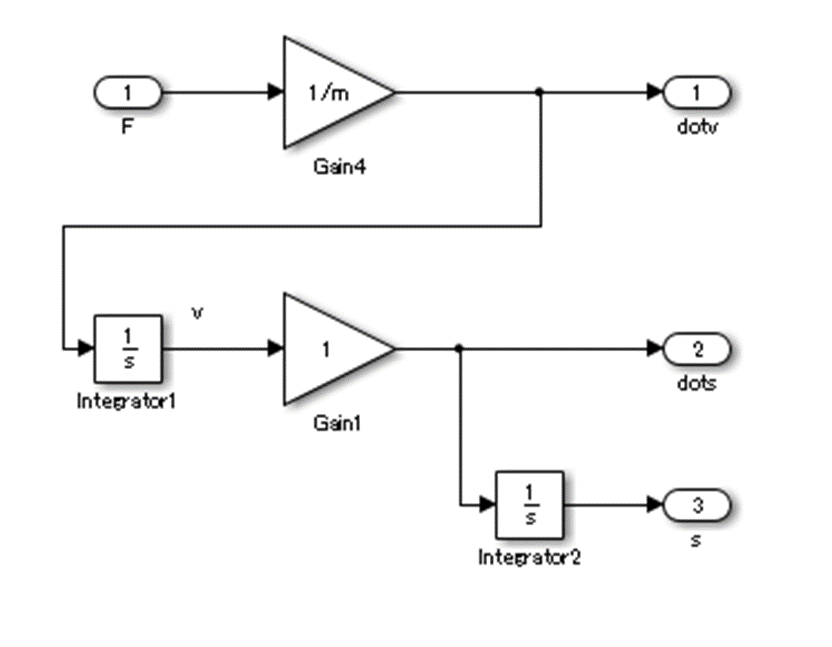
運動方程式のブロック図
運動方程式のブロック図(離散化)
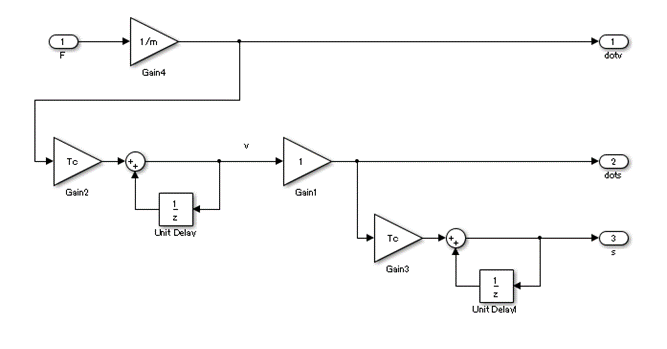
速度の漸化式
\(\boldsymbol{\dot{v}}(t)=\displaystyle \frac{1}{m}\boldsymbol{F}(t)\)
\(\boldsymbol{v}(t)=\boldsymbol{\dot{v}}(t)\Delta T + \boldsymbol{v}(t-\Delta T) \)
距離の漸化式
\(\boldsymbol{\dot{s}}(t)=\boldsymbol{v}(t)\)
\(\boldsymbol{s}(t)=\boldsymbol{\dot{s}}(t)\Delta T + \boldsymbol{s}(t-\Delta T) \)
Cコード化
上記の情報を元に作成したCコードが以下になる。
#include <stdio.h>
double dotV;
double V;
double Vzi;
double dotS;
double S;
double Szi;
const double m=1;
int ObjectMovementModel(double F, double deltaT)
{
int ret = -1;
if( m != 0 ){
dotV = 1/m * F;
V = dotV * deltaT + Vzi;
Vzi = V;
dotS = V;
S = dotS * deltaT + Szi;
Szi = S;
}
return ret;
}
int main()
{
int i;
double F = 0;
printf("F,v,s\n");
for( i = 0; i < 10000; i++ ){
if( i >= 5000 ){
F = 1;
}
ObjectMovementModel( F, 0.001 );
printf("%lf,%lf,%lf\n",F, V, S);
}
return 0;
}シミュレーション結果
なんか、printfで各変数を出力してるから、
動きについても見れる感じ?
見れる。
C言語で直接グラフ表示は難しいから、
Excelでシミュレーション結果のグラフを作った。
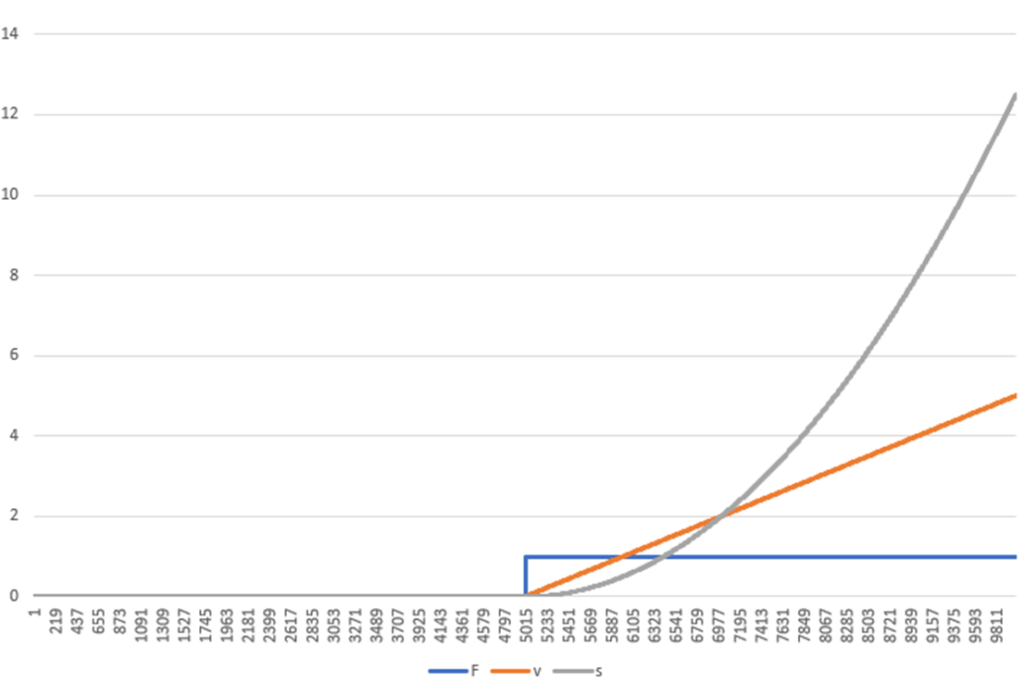
おー!
以前確認した振る舞いと一致するね!
という感じで、状態空間モデルを使用しない場合のシミュレーションプロセスを見せた感じだ。
まとめ
まとめだよ。
- ブロック図、漸化式を再掲。
- 上記を元にCコード化。
- 上記のシミュレーション結果を見せた。
バックナンバーはこちら。


コメント