
G検定記事はこちら。
https://www.simulationroom999.com/blog/jdla-deep-learning-for-general-2020-1/
動機
- 前回に「推論・探索の時代」の続き
- 行動計画、自動計画、プランニングという領域があるらしいので超簡単に調査&記載
行動計画
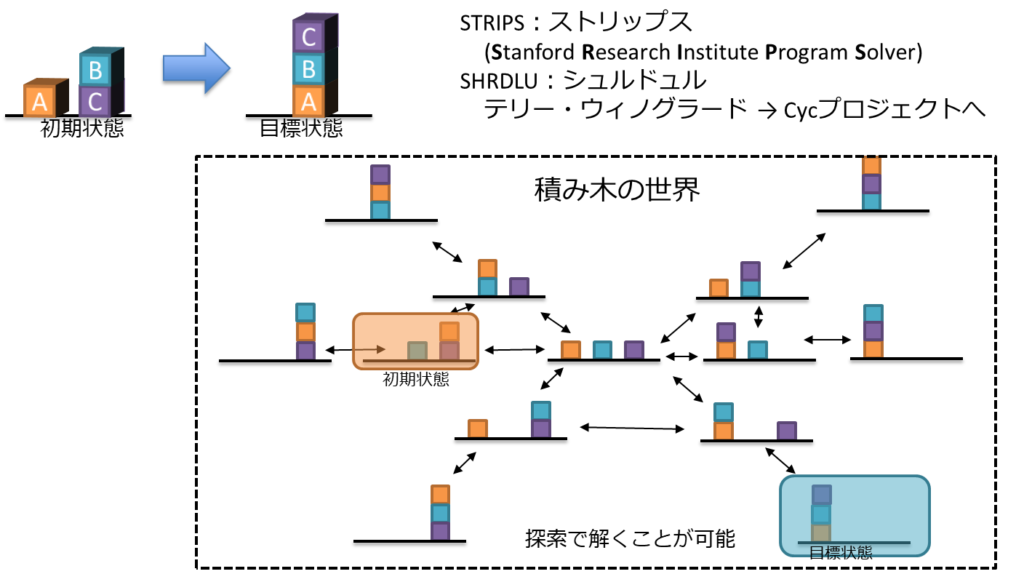
ロボットの行動計画も探索で実施可能。
特に古典プランニングの以下は「積み木の世界」を例とされることが多い。
- STRIPS:ストリップス
- (Stanford Research Institute Program Solver)
- SHRDLU:シュルドュル
- テリー・ウィノグラードが考案。
- Cycプロジェクトに引き継がれる。
まとめ
- イメージとしては「ハノイの塔」のアプローチで複雑なものを対処できる手法。
- 複雑な手順をバラシて再構築するセンスが問われる。
- これも現在に於いて通用する概念。
- ファクトリーオートメーション
- お掃除ロボット系


コメント